

Double ring detecting mechanism for robot joint speed reducer flexibility
A technology of robot joints and detection mechanisms, which is applied in the direction of manipulators, joints, manufacturing tools, etc., can solve the problems of the control influence of the system motion and the inability to quantitatively detect the flexibility error of the reducer, so as to improve the control speed and precision, which is conducive to accurate The effect of control and effective detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The embodiment of this device is as follows:
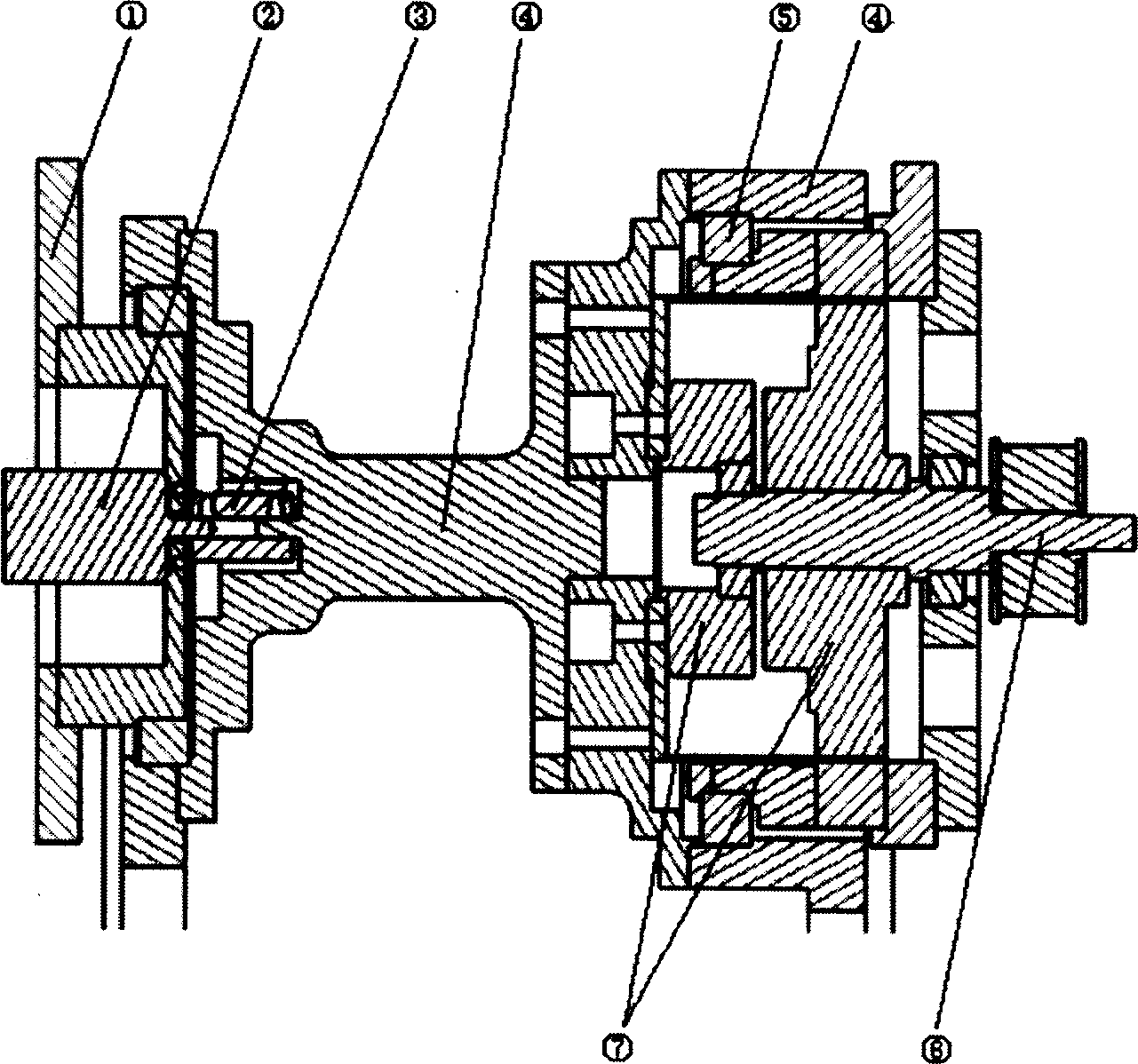
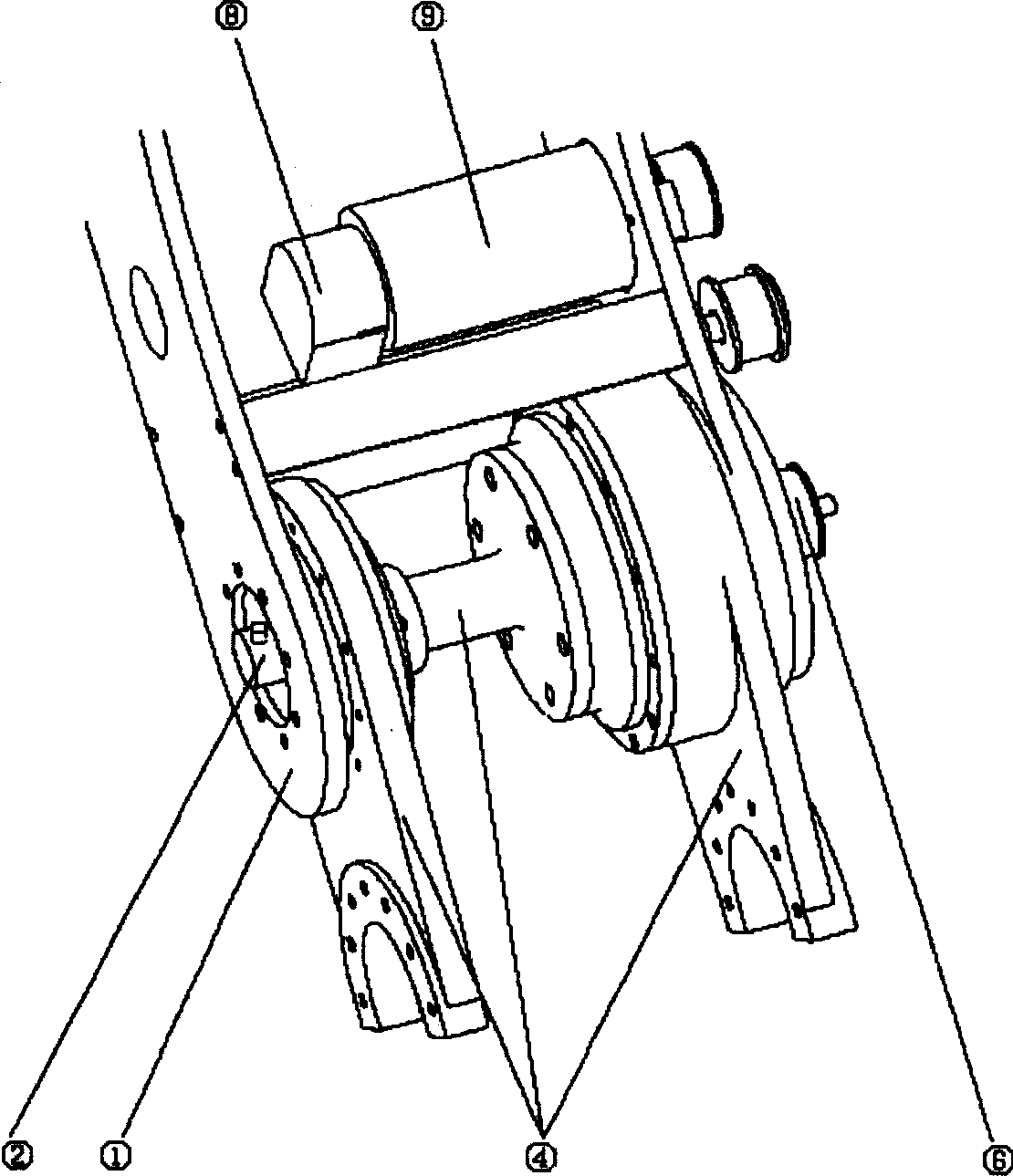
[0019] The first step: if figure 1 As shown in , the rotating end of the motor ⑨ is connected with the input end ⑥ of the reducer through a synchronous transmission belt to drive the joint movement. The photoelectric shaft angle encoder ⑧ is installed on the rotating shaft of the motor. The output end ④ of the harmonic reducer ⑦ realizes the relative rotation with the fixed end ① of the potentiometer through the bearing ⑤. According to the sensor installation criterion proposed in the technical proposal, the potentiometer ② is fixedly connected with the fixed end of the potentiometer, and the rotating shaft of the potentiometer It is connected to the output end of the reducer through a flexible coupling ③, so that the potentiometer can measure the relative rotation angle of the output end of the reducer. The coaxiality between the potentiometer and the output shaft of the reducer mainly depends on the processing accuracy ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More