

Ship power-positioning control system based on fuzzy self-adaption algorithm
A fuzzy self-adaptive and dynamic positioning technology, applied in the field of control systems in the field of ship engineering technology, can solve problems such as low optimization efficiency and inability to achieve optimal control, so as to reduce positioning energy consumption, reduce energy consumption, and improve power The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
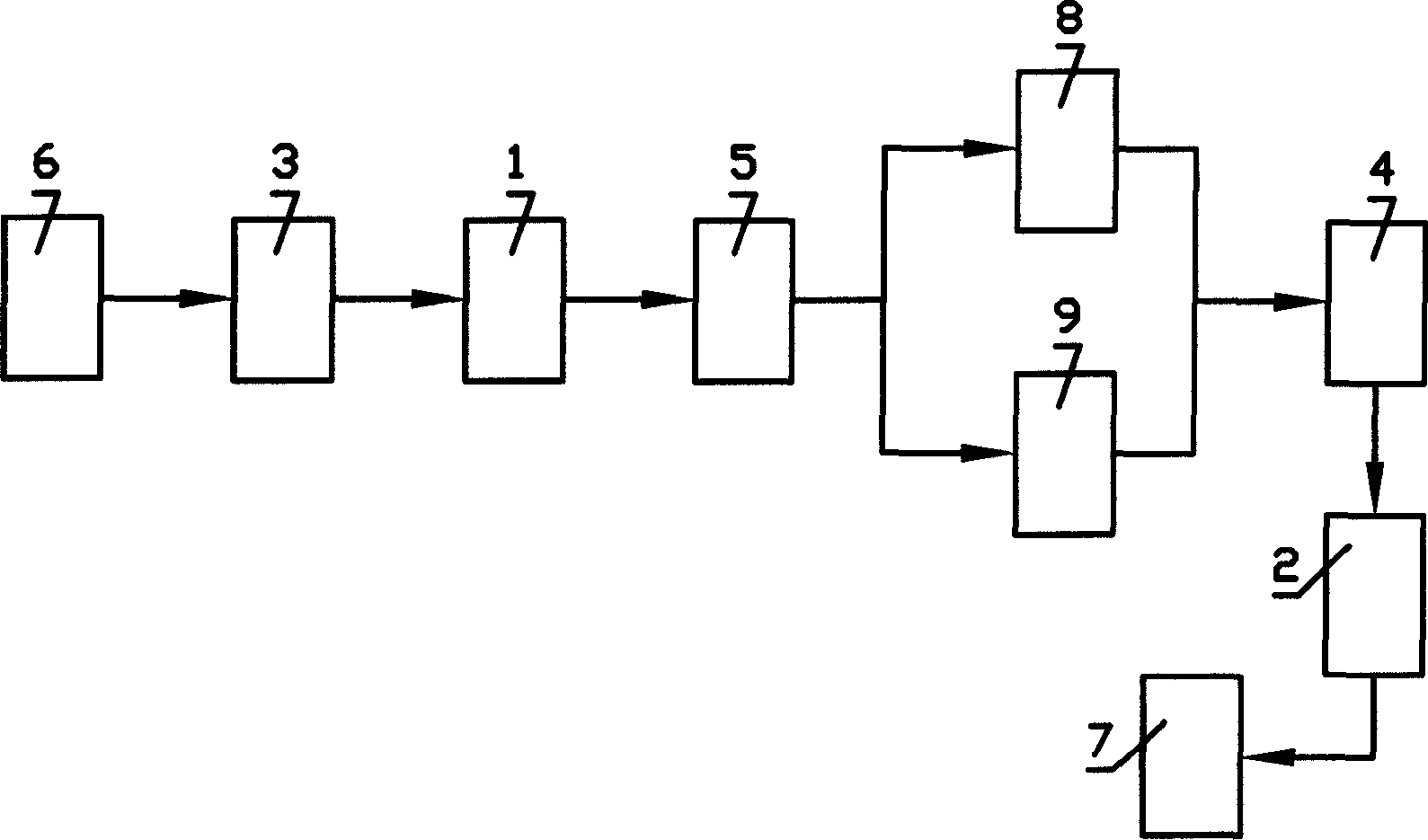
[0014] Such as figure 1 As shown, the present invention includes: computer 1, potential amplifier 2, analog / digital converter 3, digital / analog converter 4, filter 5, positioning system 6, actuator 7, learner 8, optimization decision maker 9, The information output of the positioning system 6 is connected to the input end of the analog / digital converter 3, the output end of the analog / digital converter 3 is connected to the computer 1, the computer 1 is connected to the input end of the filter 5, and the output end of the filter 5 is passed through the learner 8 . The optimization decision maker 9 is connected to the input end of the digital / analog converter 4 , the output end of the digital / analog converter 4 is connected to the input end of the potential amplifier 2 , and the output end of the potential amplifier 2 is connected to the actuator 7 .
[0015] The positioning system 6 is a satellite locator or a hydroacoustic positioning system.
[0016] The actuator 7 is a set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More