

Magnetic adsorption wall climbing robot with curved surface adaptive ability
A wall-climbing robot and self-adaptive technology, applied in the field of robotics, can solve the problems of complex surface topography, poor steering ability, poor adaptability, etc., to ensure reliable drive and movement flexibility, load capacity and movement flexibility guarantee, good The effect of adaptive performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
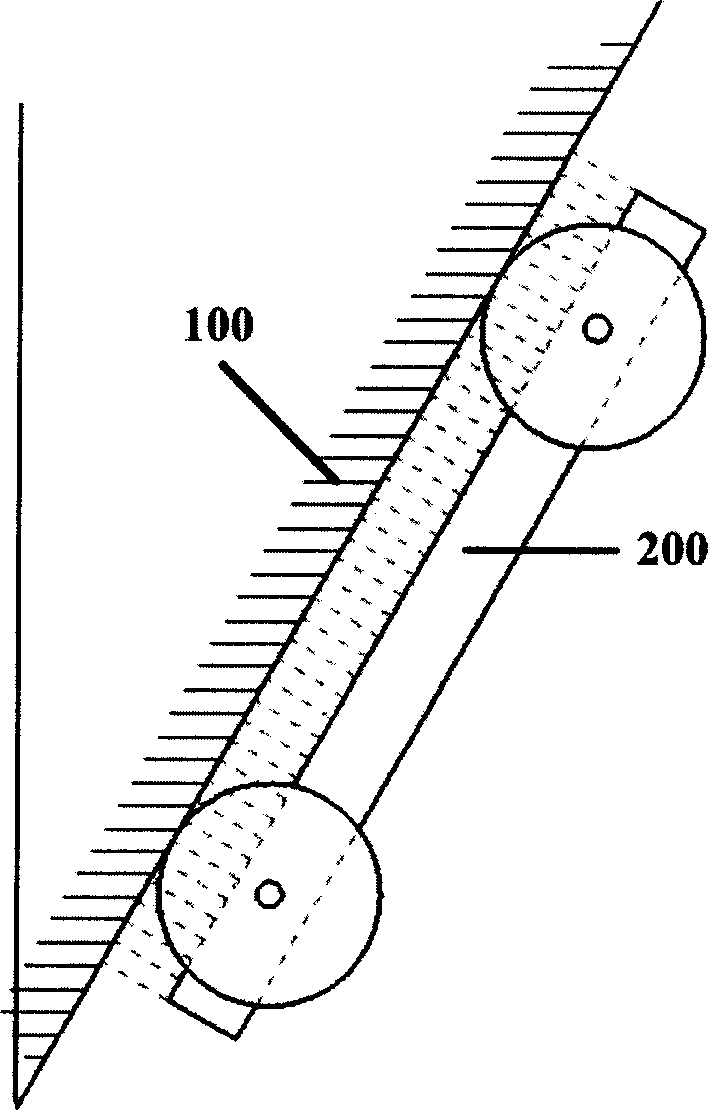
[0040]Figure 1 is a schematic diagram of the working principle of the permanent magnet non-contact adsorption wheeled movement scheme. Wherein, the wheeled moving mechanism 200 is adsorbed and runs on the magnetically permeable wall surface 100 by the adsorption force generated by the permanent magnet adsorption device installed on its chassis. There is no contact between the permanent magnetic adsorption device and the magnetically permeable wall 100 (as shown by the dotted line in the figure), and there is a certain air gap between them.
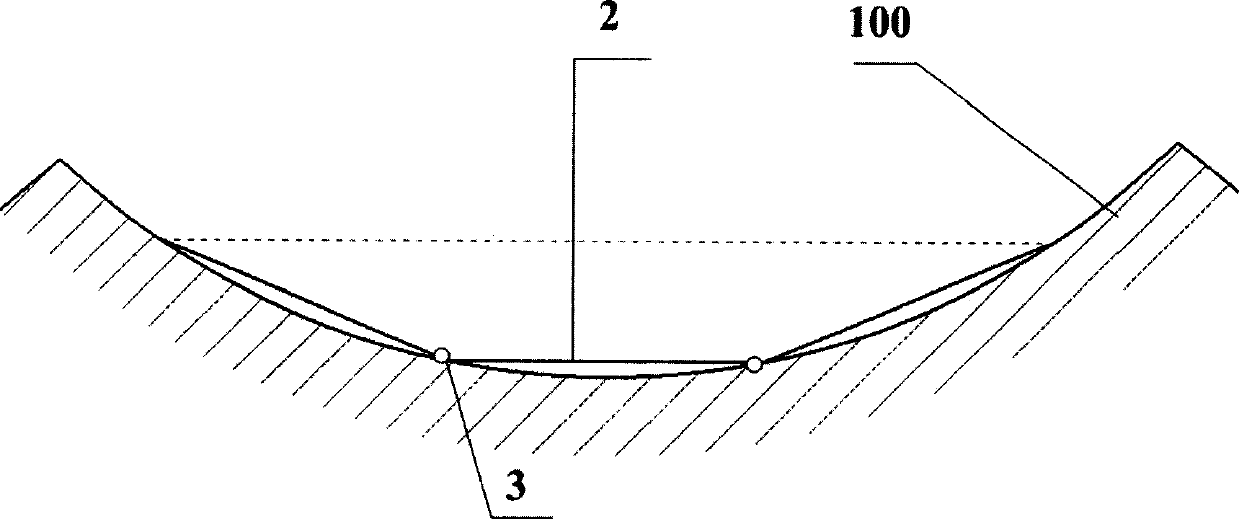
[0041] Fig. 2 is a schematic diagram of how to determine the size of the permanent magnetic adsorption device and the principle of self-adaptation of the curved surface according to the curvature of the curved surface and the allowable change in the air gap between the permanent magnetic adsorption device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More