

Multiple obstacle environment-adaptive combined mechanism robot device
A robot and environmental technology, applied in motor vehicles, transportation and packaging, tracked vehicles, etc., can solve problems such as inability to adapt, slow driving speed, and easy wear and tear, and achieve the effects of easy modularization, fast deformation, and easy control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
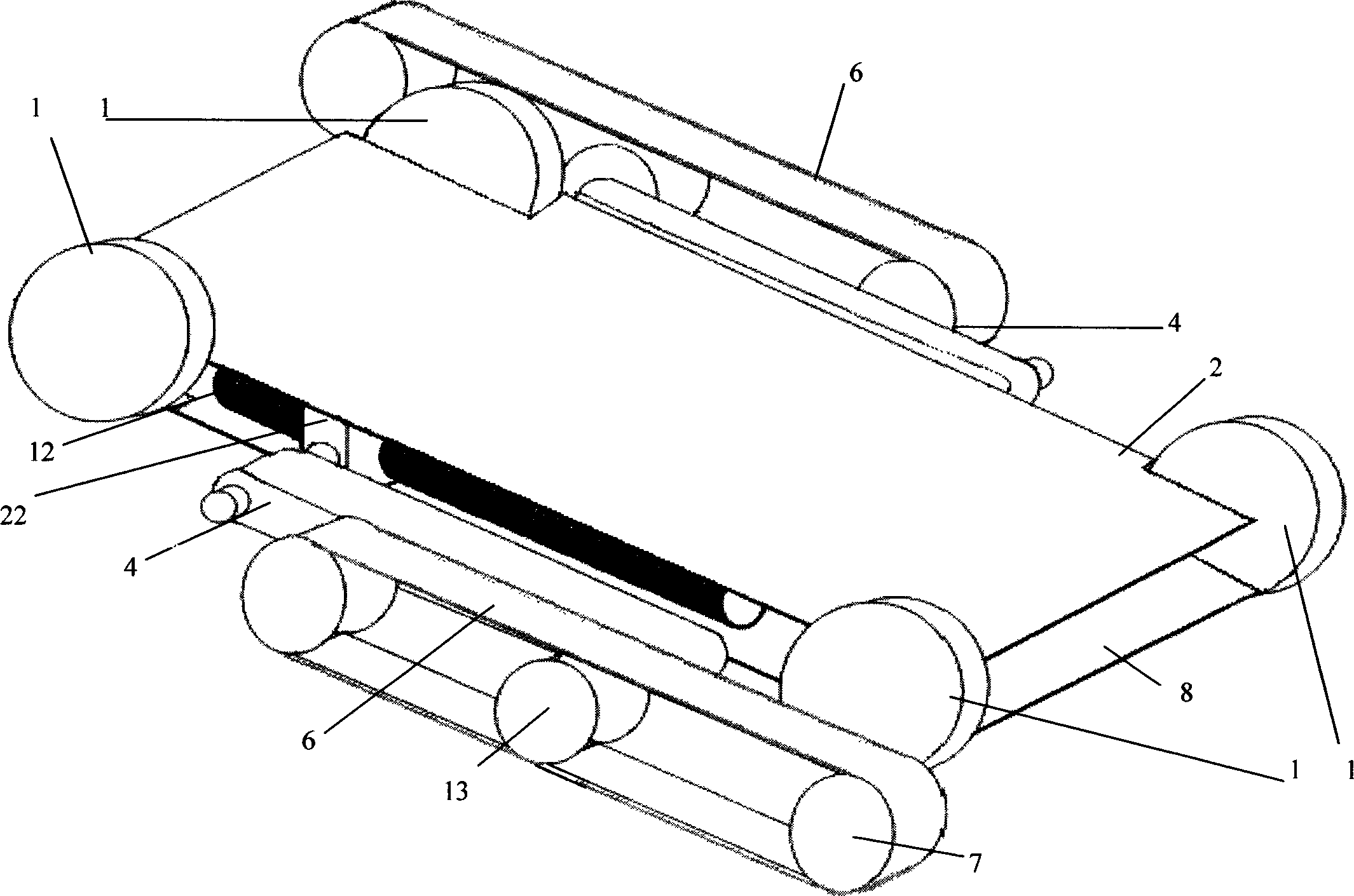
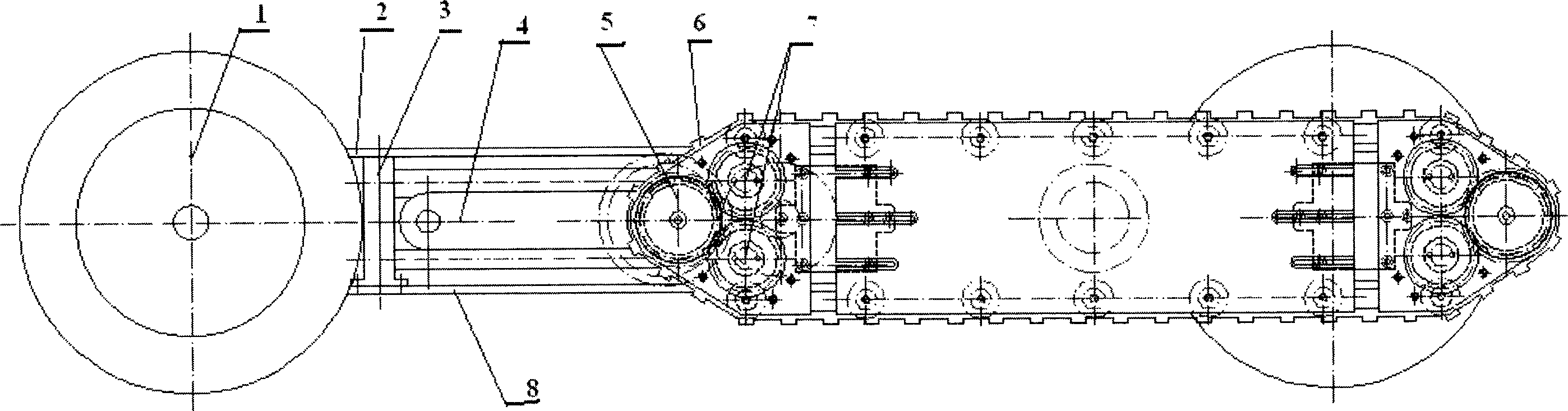
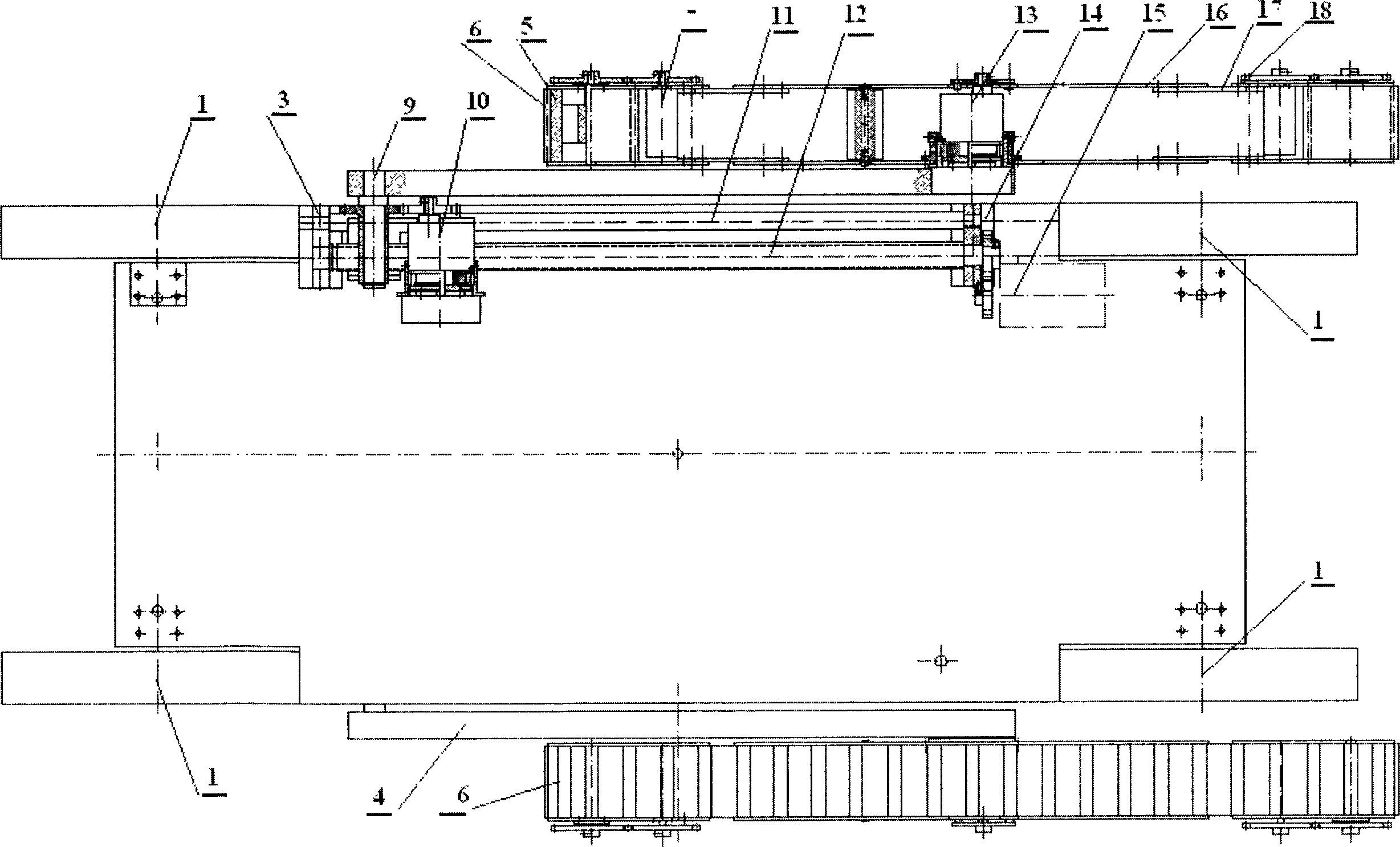
[0027] like figure 2 , 3 , 4, where:
[0028] 1. There are 4 wheels in total, symmetrically distributed on the four corners of the bottom plate;
[0029] 2. Upper bottom plate;
[0030] 3. The screw and guide rod support are fixed on the lower base plate 8 and serve as thrust sliding bearings;
[0031] 4. Rocker arm;
[0032] 5. Track drive wheel;
[0033] 6. Tracks;
[0034] 7. The crawler drive motor and reducer are equipped with a self-locking brake to drive the drive wheel of the crawler to rotate;
[0035] 8. Lower floor;
[0036] 9. Rocker shaft;
[0037] 10. The motor and reducer that drive the rotating shaft of the rocker arm are equipped with a self-locking electromagnetic brake;
[0038] 11. Guide rod;
[0039] 12. Screw;
[0040] 13. A deceleration motor for driving the rotation of the crawler support mechanism 16, the output shaft of the decelerator is equipped with a thumb wheel, the motor shell at the other end is fixedly installed with the rocker arm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More