

Five freedom degree numerically controlled fraise machine
A technology of CNC milling machine and degree of freedom, which is applied in the field of CNC milling machines and can solve problems such as poor stiffness, complex CNC programming, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
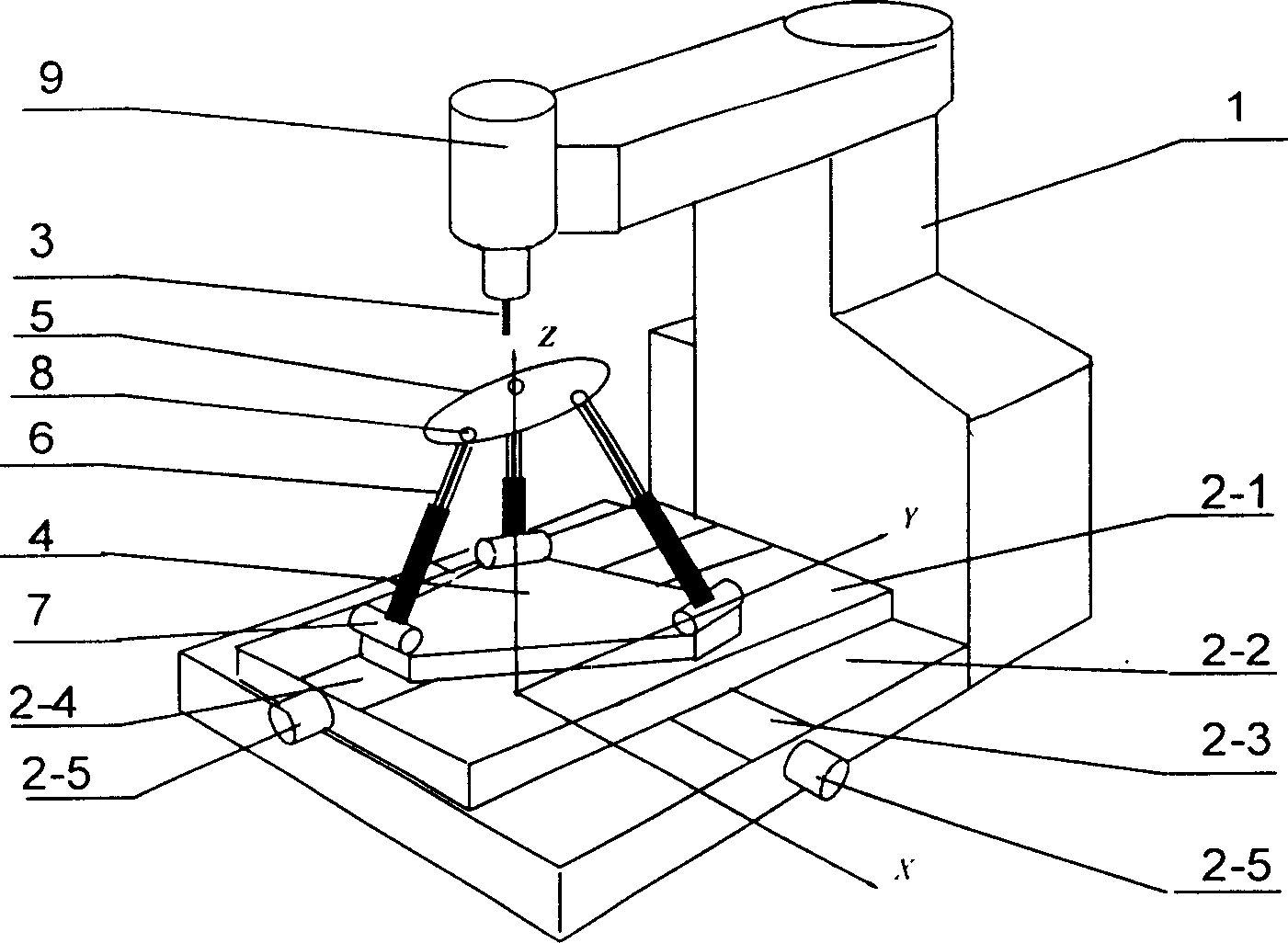
[0007] Embodiment 1: The five-degree-of-freedom CNC milling machine described in this embodiment includes a milling machine bed 1, a platform base, a machining tool 3, and an electric spindle 9 that controls the movement of the machining tool 3. It also includes a milling machine bed 1 or The three-degree-of-freedom RPS mechanism connected to the platform base, the three-degree-of-freedom RPS mechanism is composed of the lower platform 4, the motion platform 5 and the telescopic rod 6 composed of the screw nut mechanism, and the telescopic rod 6 is three, each Both ends of the telescopic rod 6 are hinged with the lower platform 4 and the moving platform 5 respectively. The specific hinge mode is that the telescopic rod 6 is connected with the lower platform 4 through the rotating pair 7 , and the telescopic rod 6 is connected with the moving platform 5 through a ball hinge 8 or a Hooke twist.
specific Embodiment approach 2
[0008] Embodiment 2: The difference from Embodiment 1 is that this embodiment describes the specific milling machine bed and platform base structure. refer to figure 1 , the milling machine bed 1 is a vertical bed, the machining tool 3 and the electric spindle 9 are installed on the bed; the platform base is a two-degree-of-freedom platform base, which includes a base 2-2 and The mobile platform 2-1 arranged on the base 2-2, the upper surface of the base 2-2 is provided with an X guide rail 2-3, and the upper surface of the mobile platform 2-1 is provided with a Y guide guide 2-4 ; The three-degree-of-freedom RPS mechanism is arranged on the mobile platform 2-1, that is, the lower platform 4 on the three-degree-of-freedom RPS mechanism is arranged on the Y guide rail 2-4; the series part includes the mobile platform 2-1, the base 2- 2 and the lower platform 4 of the three-degree-of-freedom RPS mechanism, the movement of the lower platform 4 of the RPS mechanism relative to th...
specific Embodiment approach 3
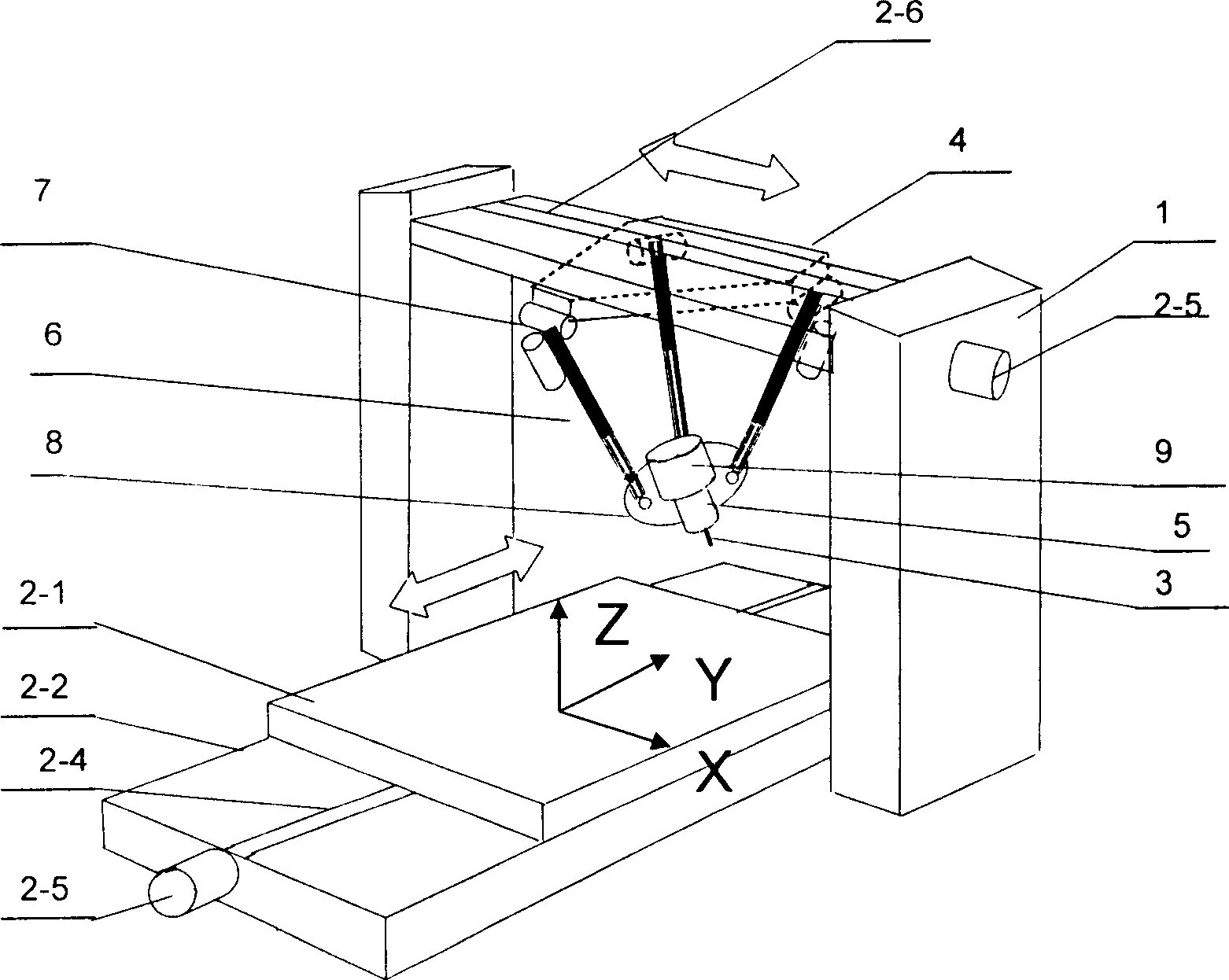
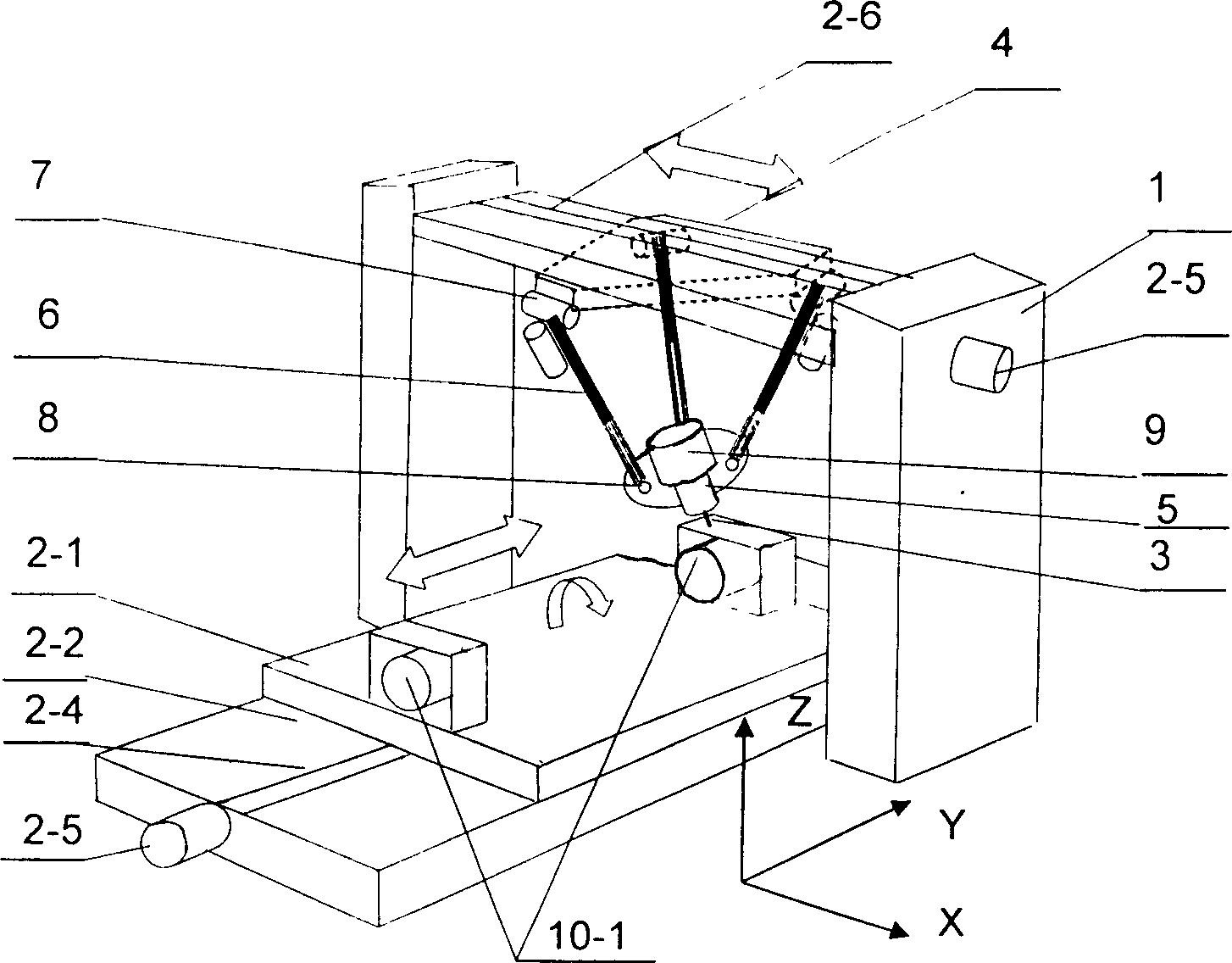
[0009] Embodiment 3: The difference from Embodiment 2 is that this embodiment describes another specific structure of the milling machine bed and platform base. refer to figure 2 , the milling machine bed 1 is a gantry-type bed, and X guide rails 2-6 are installed on the beam of the gantry-type bed; the three-degree-of-freedom RPS mechanism is hung upside down on the beam of the gantry-type bed, and the specific connection structure It is: a slider is provided on the bottom surface of the lower platform 4 of the three-degree-of-freedom RPS mechanism, and the slider is installed in the X guide rail 2-6, and the one-dimensional movement of the RPS mechanism in the X direction can be realized by the motor 2-5; The motion platform 5 of the RPS mechanism is connected with the lower platform 4 through a telescopic rod 6 composed of a screw nut mechanism. The upper end of the telescopic rod 6 is a rotating pair 7, and the lower end is a three-degree-of-freedom spherical hinge 8 or a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More