

Six-freedom micro operation robot with complete position and posture feedback
A degree of freedom and micro-manipulation technology, applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems not included in feedback, micro-manipulation robots with complex structures, and difficult calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
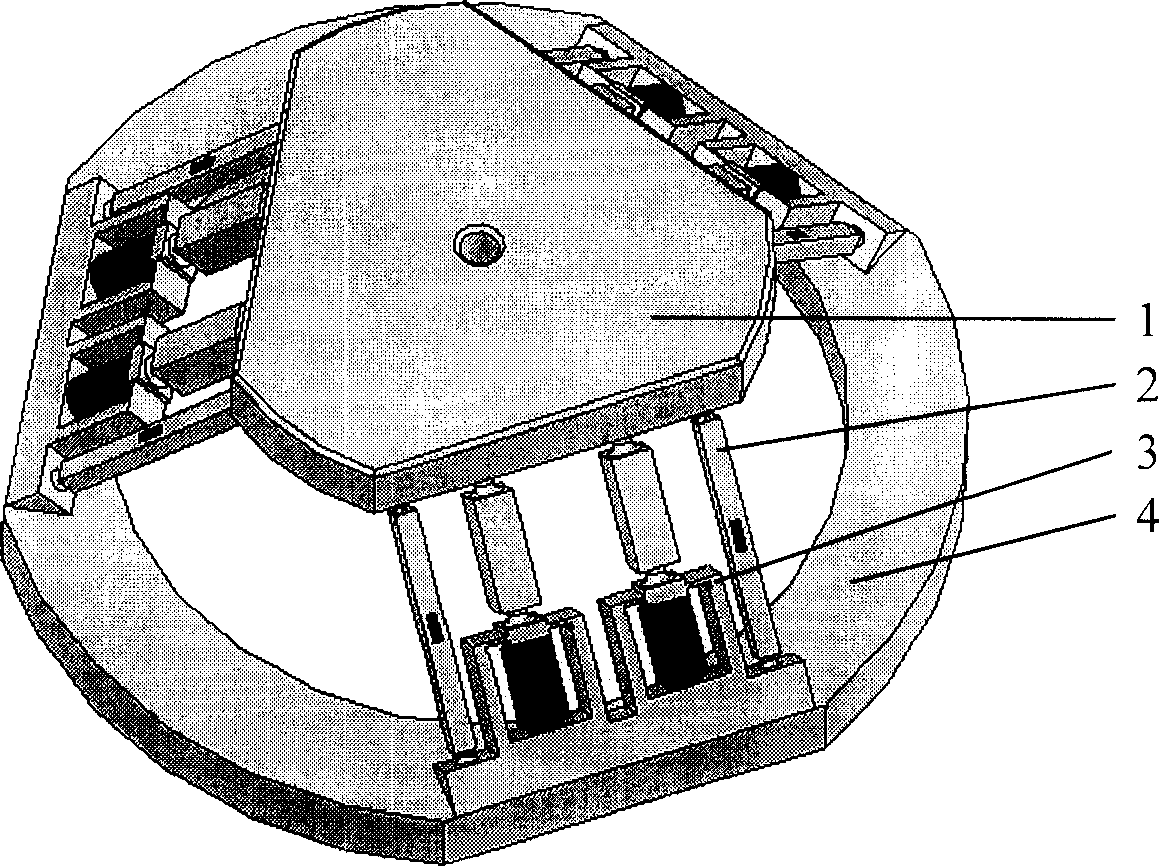
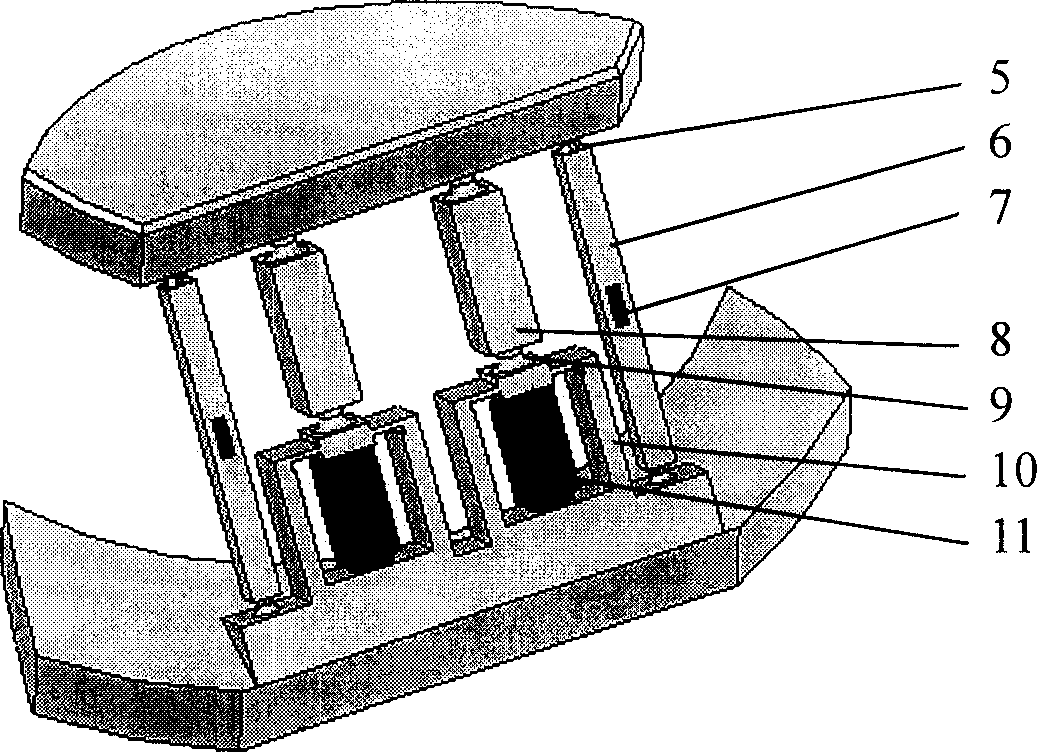
[0009] figure 1 It is an embodiment disclosed by the present invention. This six-degree-of-freedom micro-manipulation robot with full posture feedback is composed of a worktable 1, a feedback branch 2, a drive branch 3, and a base 4. The connection between the workbench 1 and the base 4 It is connected by 12 kinematic chain branches, among which, 6 kinematic chain branches are feedback branch 2, and feedback branch 2 is composed of feedback branch strut 6 and strain gauge 7 with flexible hinge 5 at both ends; the remaining 6 kinematic chain branches To drive the branch 3, the driving branch 3 is composed of a driving branch pillar 8 with flexible hinges 9 at both ends, a parallel plate elastic moving pair 10 and a piezoelectric ceramic micro-displacement device 11. The 12 kinematic chain branches are divided into 3 groups, 4 in each group, consisting of two feedback branches 2 and two drive branches 3 respectively. One end of the driving branch pillar 8 of the driving branch ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More