

Human-imitating double-foot robot artificial leg
A bipedal robot and artificial leg technology, applied in the field of robotics, can solve problems such as lack of flexibility, affect robot anthropomorphism, and no buffering effect, and achieve the effects of compact structure, easy control, and improved transmission accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings:
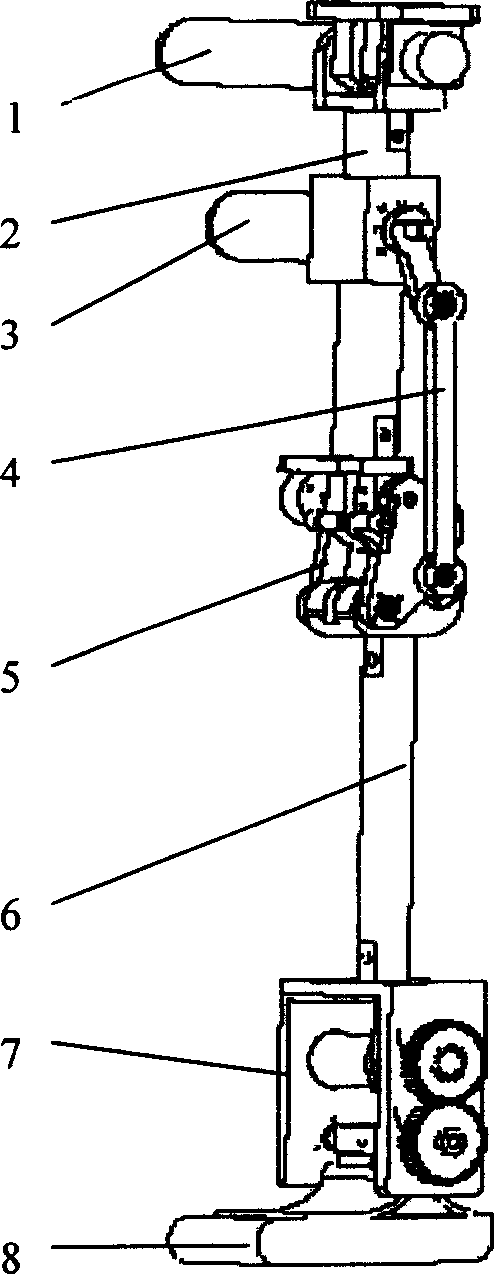
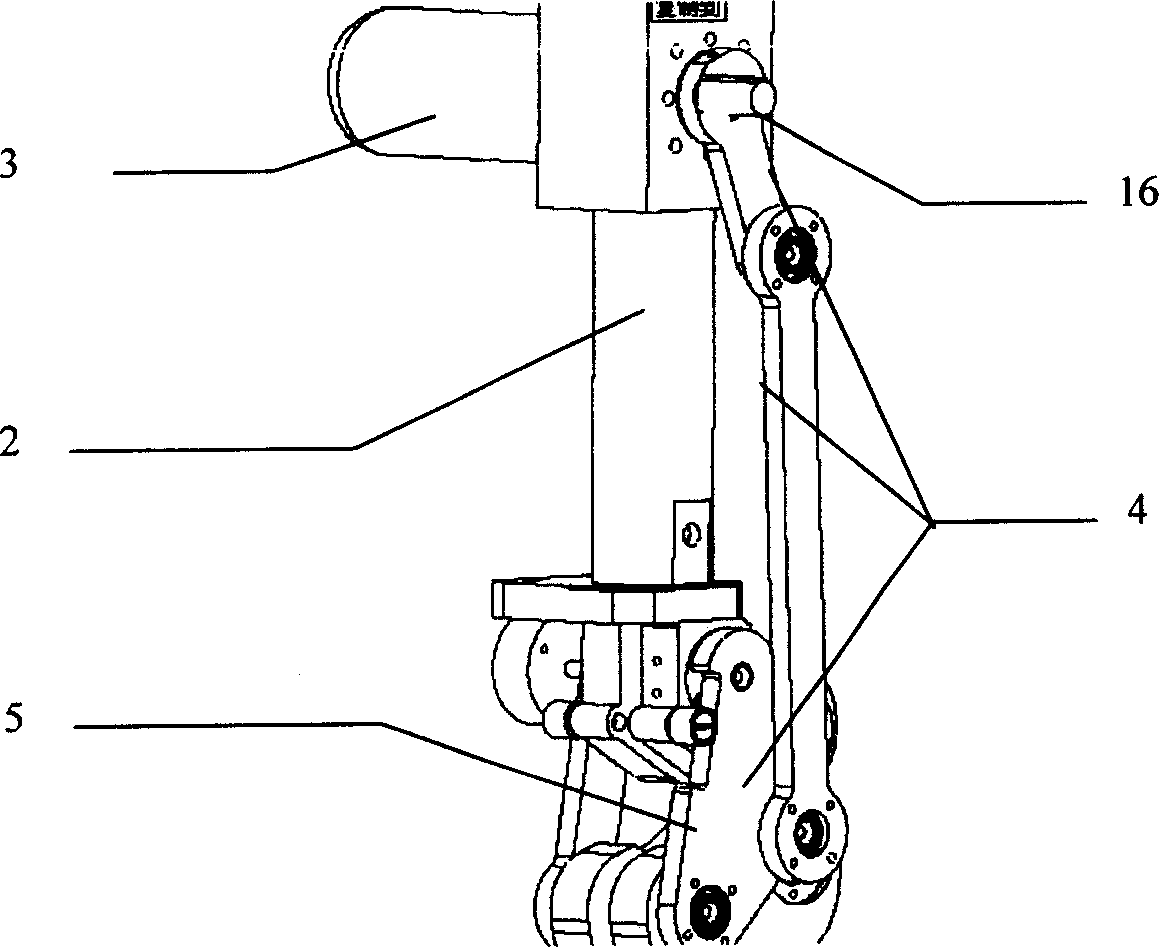
[0025] like figure 1 As shown, the present invention includes a hip joint 1, a knee joint 5, an ankle joint 7, a foot 8, a thigh link 2 and a calf link 6, and a knee joint is installed on the thigh link 2 between the hip joint 1 and the knee joint 5. The joint drive motor 3 and the knee joint 5 are two four-link closed chain structures. The knee joint drive motor 3 is connected with the rear rod of the four-link of the knee joint 5 through the parallel four-link mechanism 4, and is fixed at the front end of the four-link. There is a stopper 9, and an encoder 11 is installed on the rotating shaft at the upper end of the front rod of the four-bar linkage.
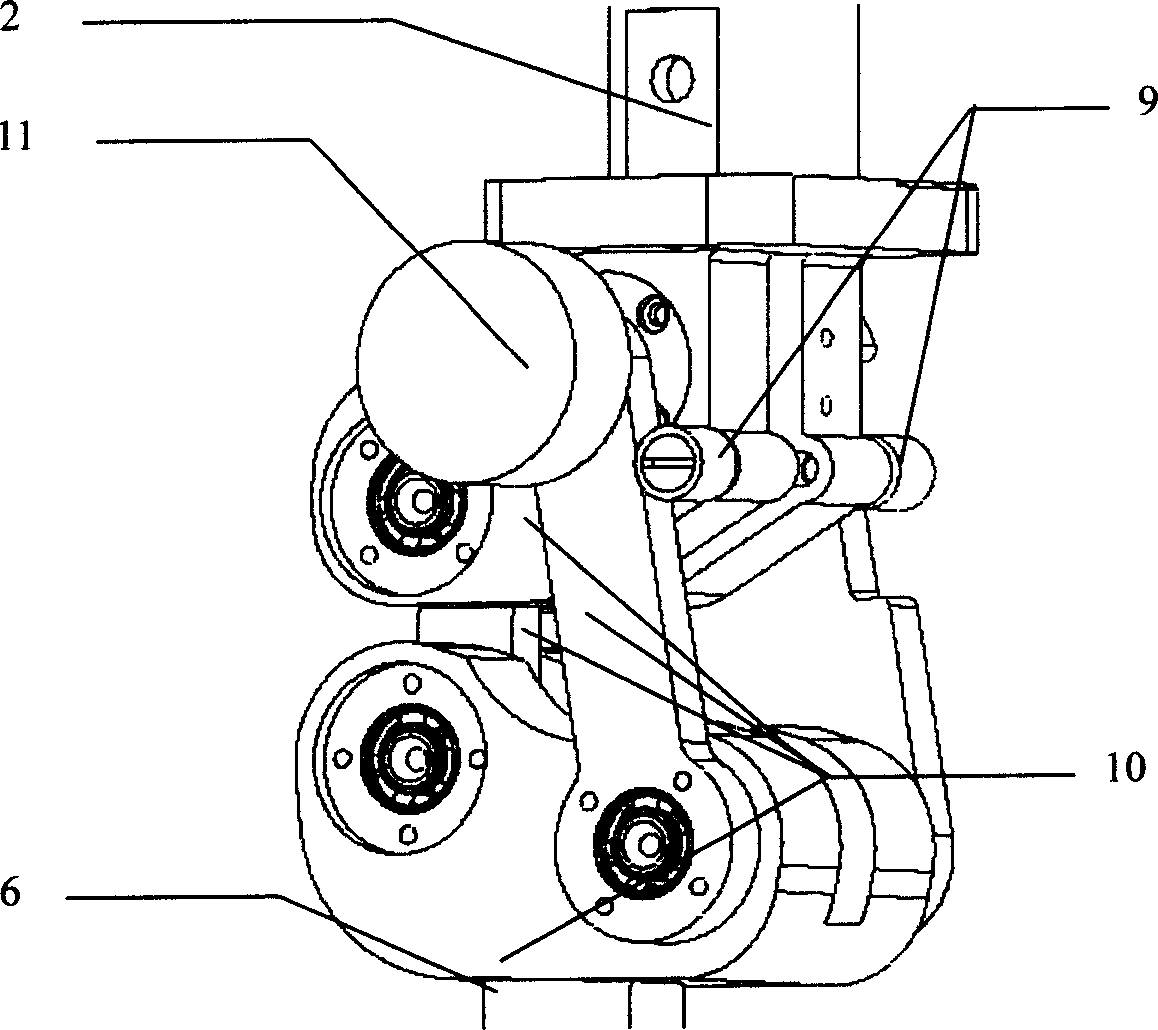
[0026] Four-link closed chain structure at the knee joint, such as figure 2 As shown, a set of four connecting rods are respectively provided on both sides of the knee joint 5, which are connected by a rotating sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More