

Calibration method for binocular vision sensor based on one-dimension target
A binocular vision and calibration method technology, applied in the field of measurement, can solve the problems of inapplicable binocular vision sensor on-site calibration, difficulty in ensuring quality, and affecting calibration accuracy, etc., to achieve the effect of flexible processing, low cost, and improved calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
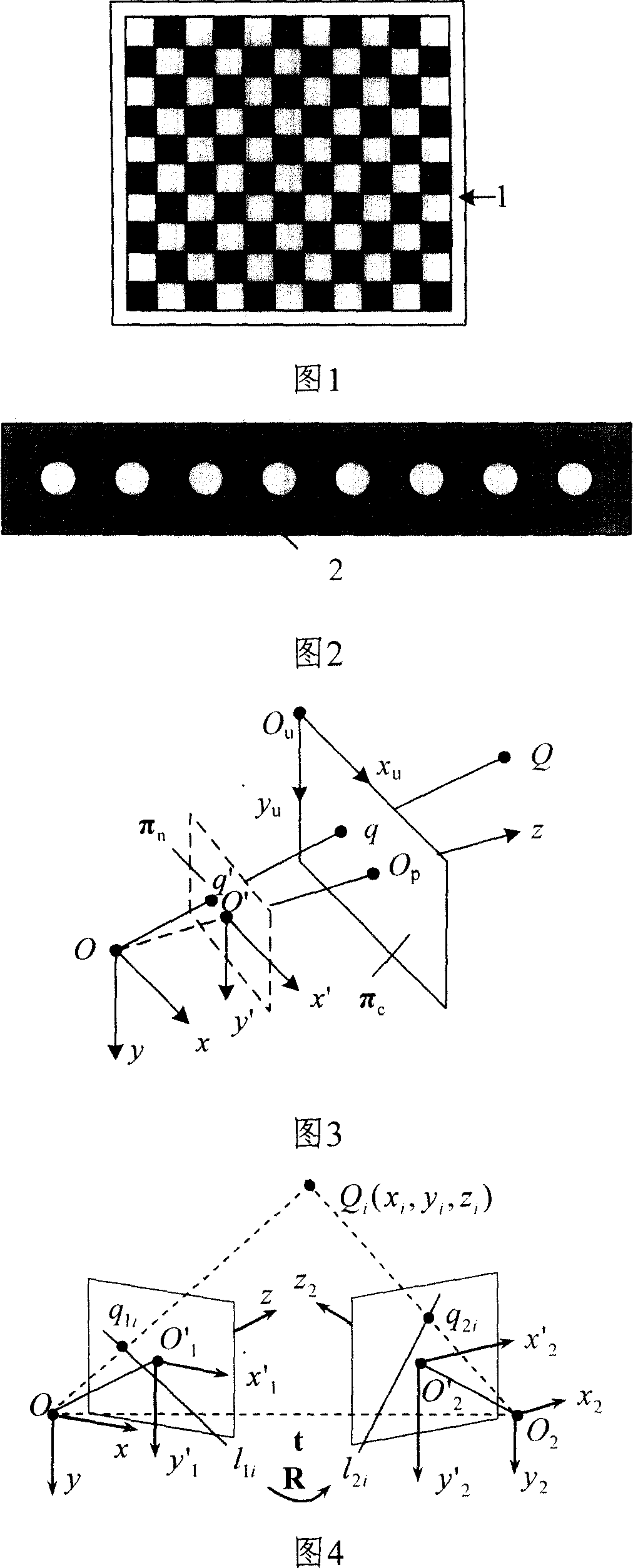
[0075] Two Minton MS368P cameras (537×505) and 50mm lenses are used to form a binocular vision sensor and a one-dimensional baseline ruler to carry out on-site, with an image resolution of 768pixels×576pixels. The working distance of the sensor is about 1500mm, and the measuring range is 200mm×200mm.
[0076] Firstly, the internal parameters of the left and right cameras are calibrated using the planar target shown in Figure 1, and the obtained calibration parameters are:
[0077] Internal parameters of the left camera
[0078] f x =8338.661f y =8324.729
[0079] u 0 =396.503 v 0 =299.245k 1 =-5.05×10 -1
[0080] Internal parameters of the right camera
[0081] f x =8392.925f y =8376.574
[0082] u 0 = 412.012 v 0 =276.325k 1 =-6.65×10 -1
[0083] Then use the one-dimensional target as shown in Figure 2, and the center point of the circular hole in the figure is the feature point. The only known information of the target is the distance between the centers of...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More