Microrobot configured to move in a viscous material
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
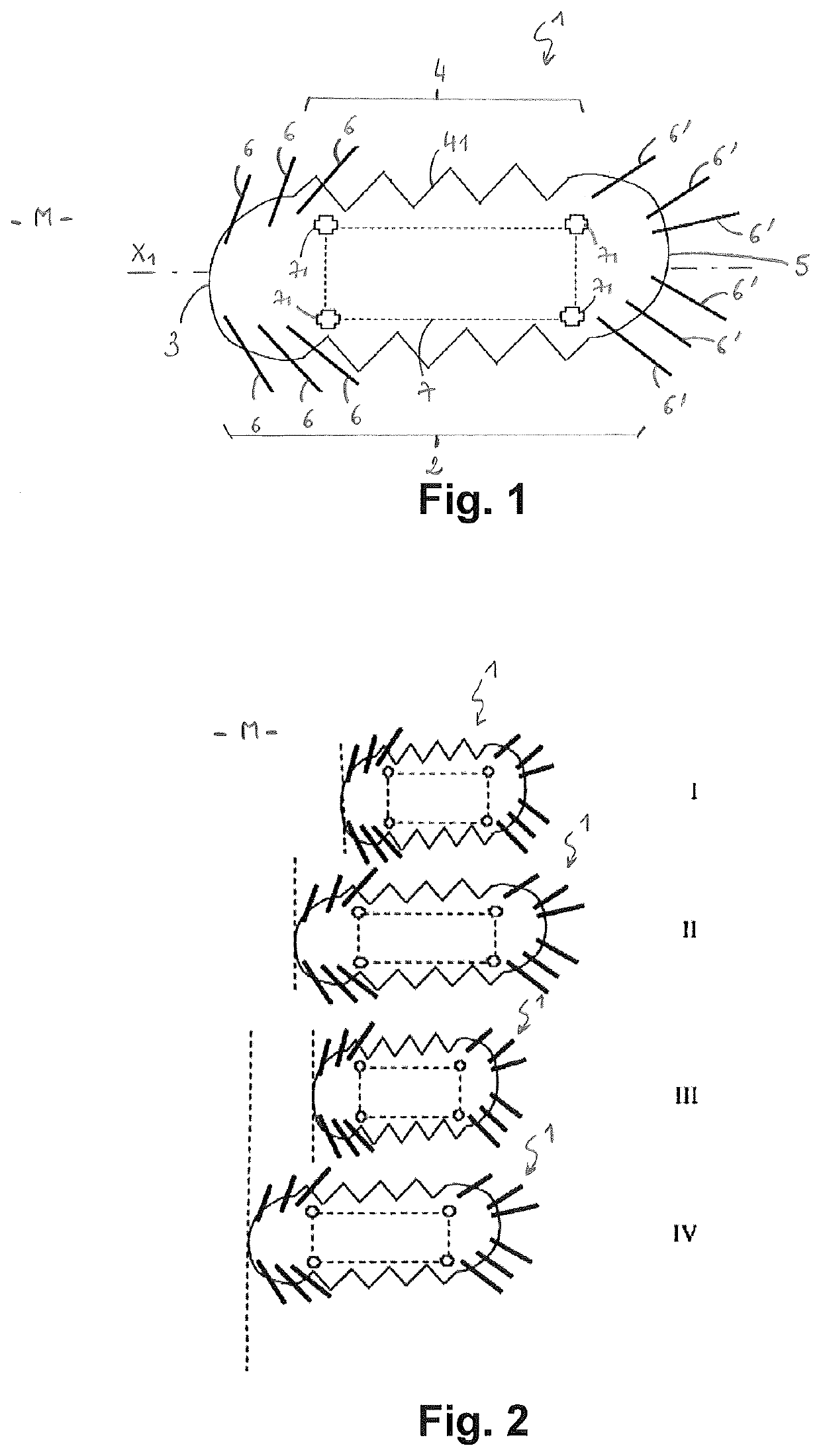
[0039]FIG. 1 is a schematic cross section of a microrobot 1 according to a first embodiment of the invention. The microrobot 1 is configured to move in a viscous material M, such as the cerebrospinal fluid or the extracellular matrix of the brain of a subject which are low Reynolds number fluidic materials for the microrobot 1. To this end, the microrobot 1 has a propulsion structure 2 comprising a head portion 3, a rear portion 5 and a deformable portion 4 connecting the head portion 3 and the rear portion 5. In the first embodiment shown in FIG. 1, the deformable portion 4 is a bellows member 41 deformable in elongation / contraction along a main axis X1 of the microrobot 1 connecting the head portion 3 and the rear portion 5. The propulsion structure 2 further comprises a piezoelectric actuator 7 configured to actuate sequentially elongation / contraction cycles of the bellows member 41.
[0040]As visible in FIG. 1, the head portion 3 comprises at its surface a plurality of propulsion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com