

Object detection device, object detection server, and object detection method
A technology for object detection and object detection, which is used in measuring devices, instruments, time registers, etc., and can solve problems such as inability to obtain, image changes, and application difficulties.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
no. 1 Embodiment approach
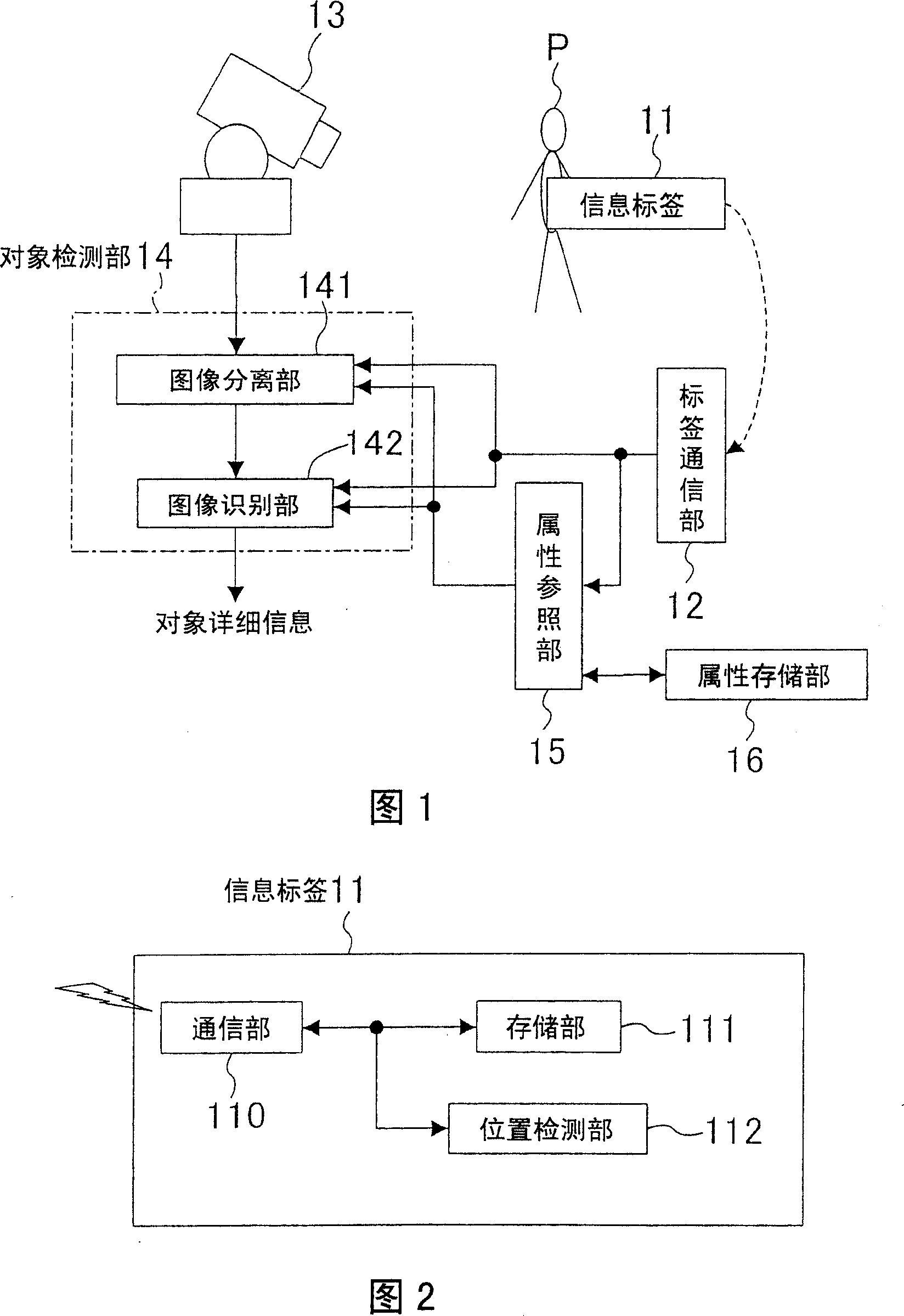
[0049] FIG. 1 is a block diagram showing a configuration example of an object detection device according to a first embodiment of the present invention. In the composition of Fig. 1, person P is taken as a given detection object. In FIG. 1 , 12 is a tag communication unit that receives tag information sent by the information tag 11 attached to the person P, 13 is an imaging unit that captures an image, and 14 is a tag information received by the tag communication unit 12 that is used by the camera. An object detection unit that detects a person P in an image captured by the unit 13 . The imaging unit 13 is installed at a position where an image including a person P can be captured.
[0050] FIG. 2 is a conceptual block diagram showing the internal configuration of the information tag 11 . In FIG. 2 , the communication unit 110 communicates with the tag communication unit 12 in a non-contact manner through radio waves, sound waves, or light as a medium, and transmits given ta...
no. 2 Embodiment approach
[0102] In the second embodiment of the present invention, an object is detected using a mobile robot having a camera as a predetermined detection target.
[0103]FIG. 15 is a diagram showing the state of the present embodiment. In FIG. 15 , a mobile robot 40 is placed on the floor FL in the home. The robot 40 as an object detection device includes: the camera 13 serving as an imaging unit; the tag communication unit 12 described in the first embodiment; the object detection unit 14 and the attribute reference unit 15 . In addition, the attribute storage unit 16 is installed in a place different from the robot 40 , and the attribute reference unit 15 refers to the attribute information stored in the attribute storage unit 16 through wireless communication.
[0104] On the floor FL, there are a horizontal cylindrical object Oa and a spherical object Ob. Objects Oa and Ob are both red. Information tags 11 are incorporated in the objects Oa and Ob, respectively, and ID informat...
no. 3 Embodiment approach
[0116] In the third embodiment of the present invention, a person serving as a subject is detected as a given detection target by a portable video camera. The portable cameras mentioned here include portable movie cameras and digital cameras, handheld phones with cameras, and information terminals.
[0117] FIG. 20 is a situation diagram showing the present embodiment. In FIG. 20 , a person Pd is photographed outdoors by a portable video camera 50 equipped with an imaging unit 13 . The person Pd has an information tag 11 that transmits ID information that specifies the person Pd as tag information using ultrasonic waves. Generally, when using the ultrasonic transmitter used for measuring the distance, it can detect the range of about 20m from the camera. Of course, the detection range changes according to the intensity of the ultrasonic waves.
[0118] The camera 50 includes: two microphones 51a, 51b; a tag communication unit 12A, and an object detection unit 14A. The micr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More