

Variable motion mode omni-bearing self-independent mobile robot running gear
A motion mode, autonomous moving technology, applied in the field of robots, can solve the problem of the wheel not turning normally, not walking in mud or sand, and high cost, achieving reliable motion characteristics, reducing requirements, and reducing the number of applications. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with drawings and implementation.
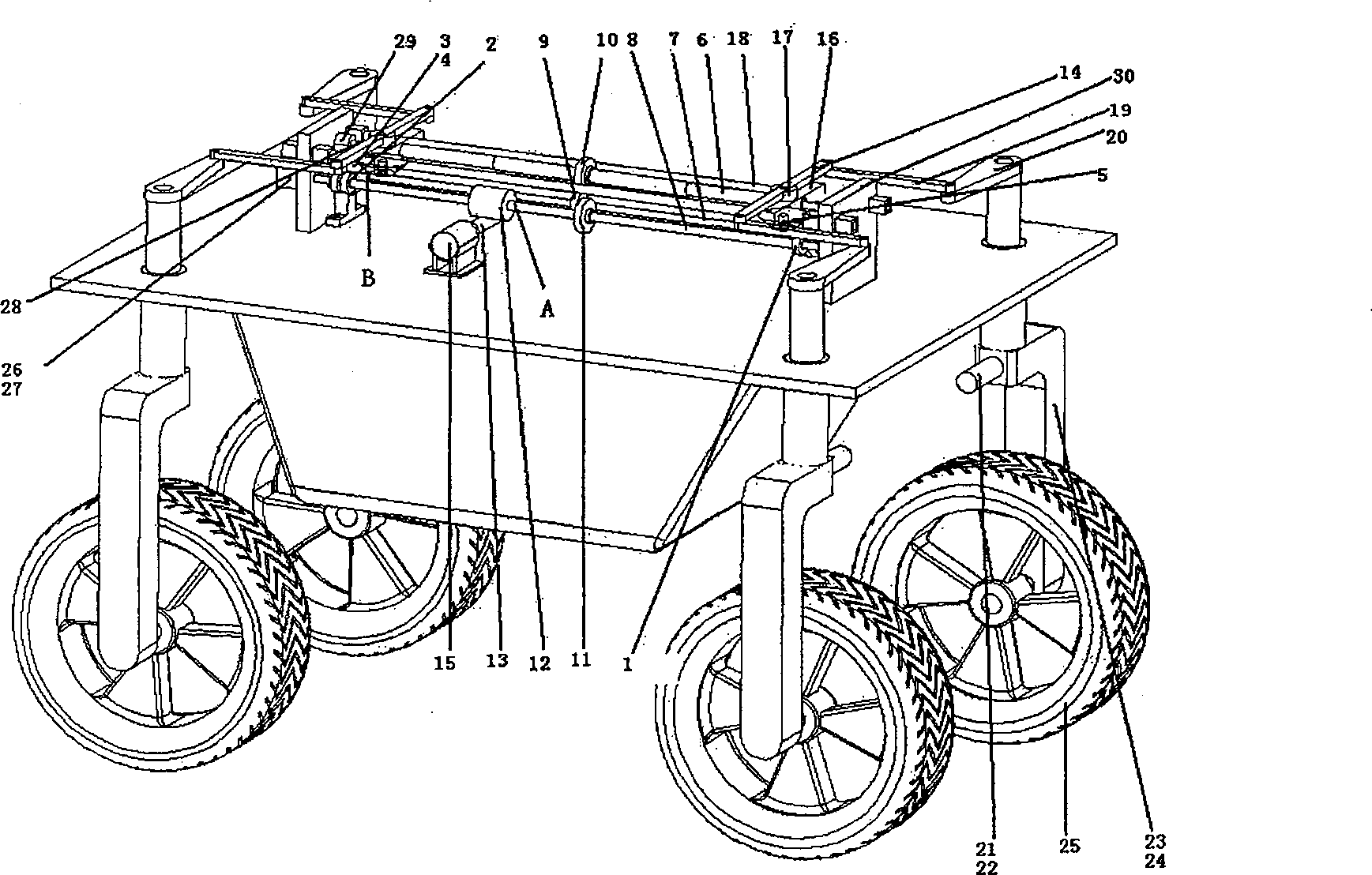
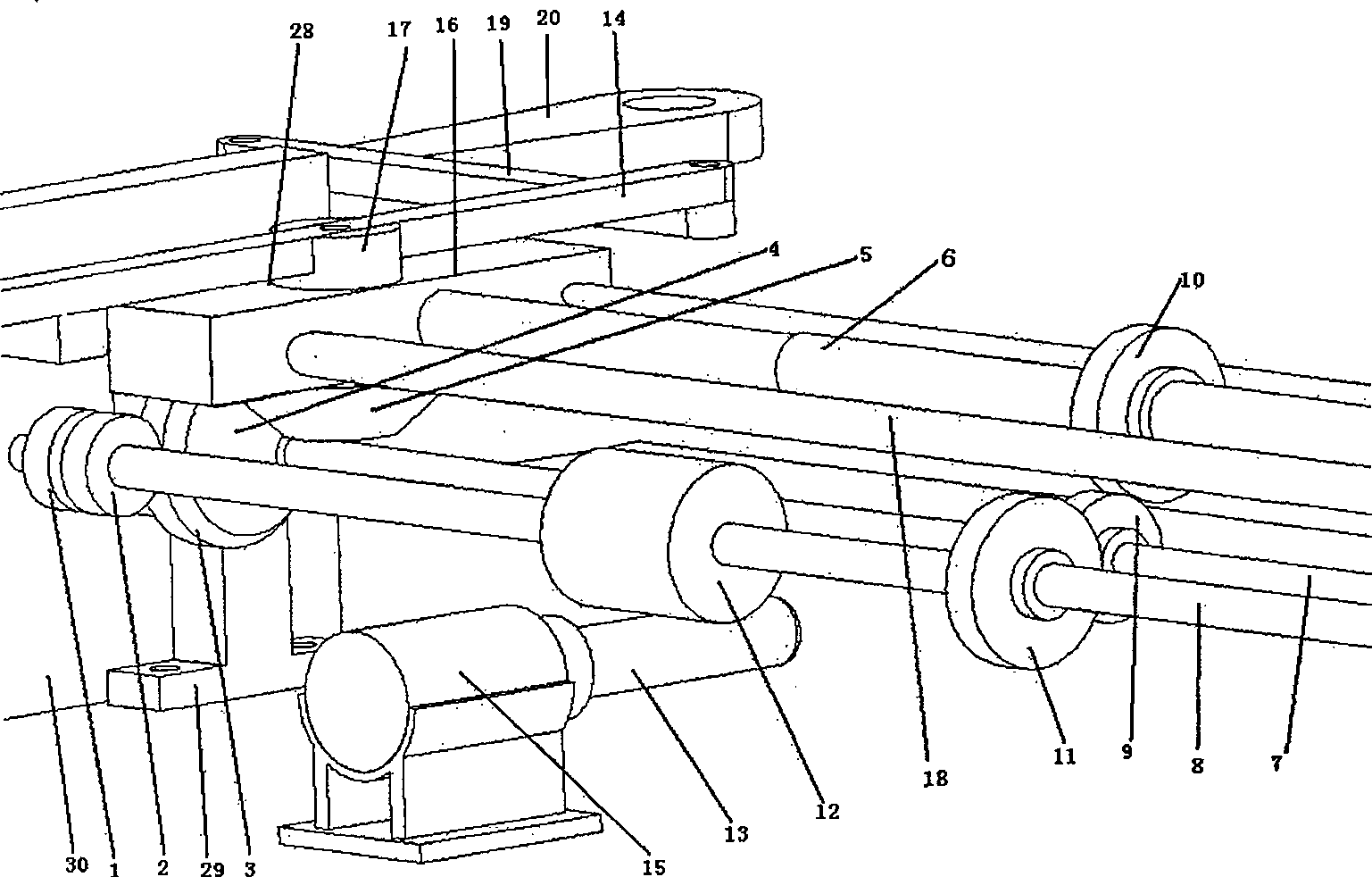
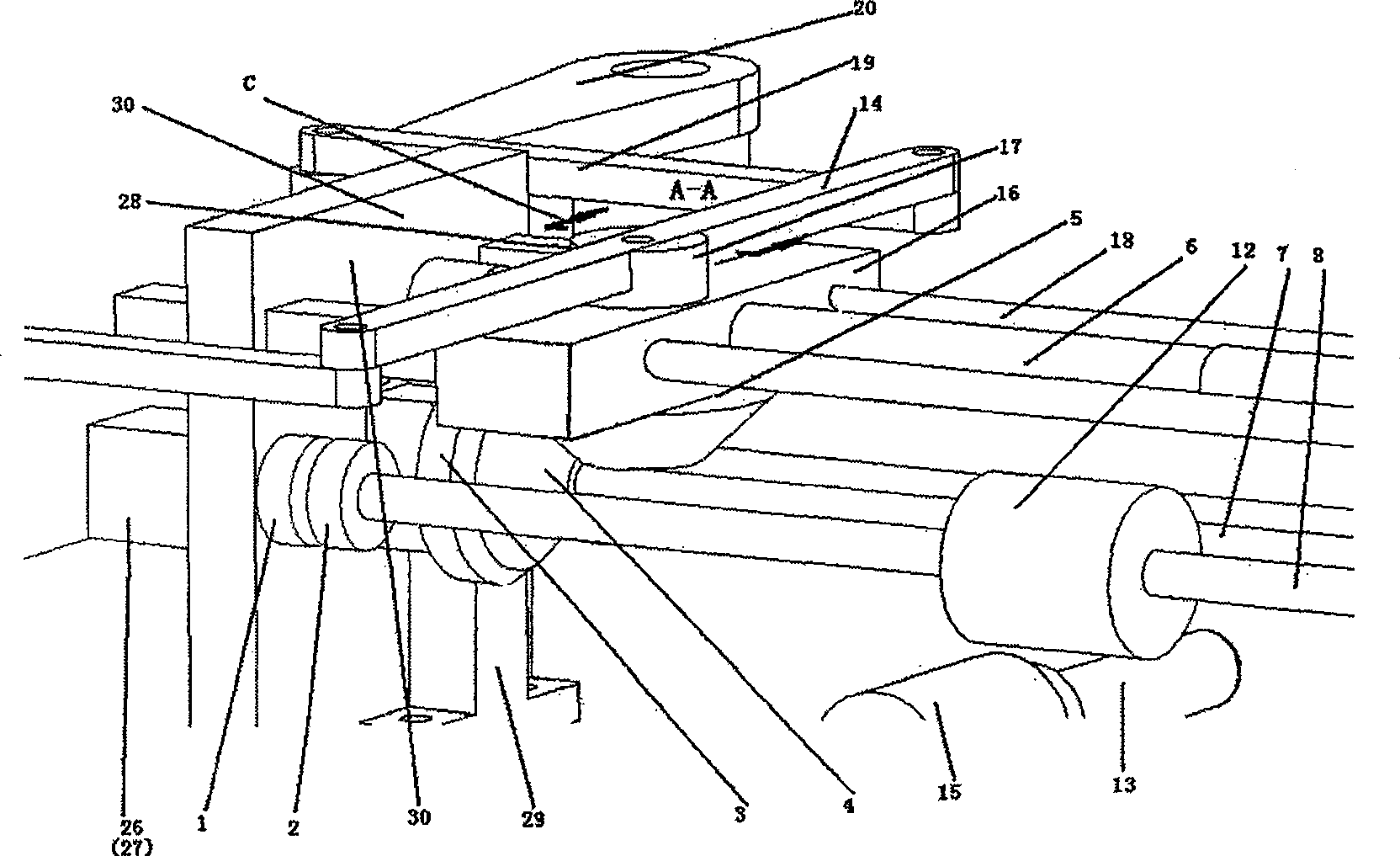
[0027] Such as figure 1 , 2 , Shown in 3 and 4, the present invention comprises four-wheel vehicle body, front and rear two sets of ball screw slider mechanisms with the same structure, three groups of transmission gear sets and four groups of wheel steering linkages with the same structure; wherein:
[0028] 1) The four-wheel vehicle body: comprising two front wheels 25, two rear wheels 25 and a box body with control parts inside, the two front wheels are respectively equipped with drive components, and the rotating shafts of the four wheels all extend out of the box Outside the upper end surface of the body;
[0029] 2) The two sets of ball screw slider mechanisms with the same structure before and after: including the screw shaft 6, the ball screw slider 16 and the ball screw guide rail 18, the upper end of the box body is respectively installed between the fron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More