

Permanent magnetism minisize robot
A technology of micro-robots and robots, applied in the field of robotics, can solve the problems of poor posture control and movement flexibility, and achieve the effects of flexible movements, convenient operation, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
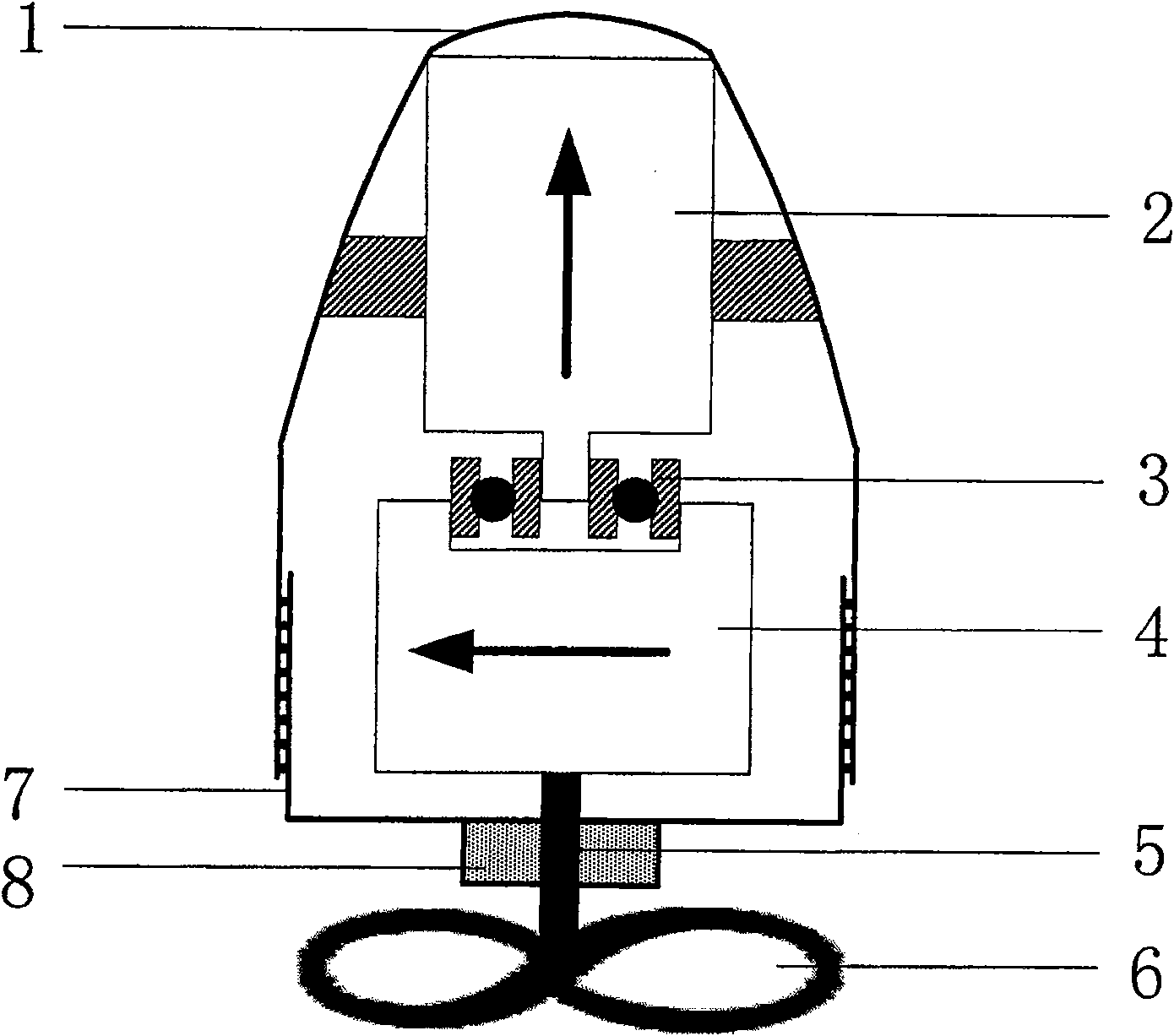
[0014] like figure 1 shown. The permanent magnet micro-robot of the present invention is composed of a shell 1, an axially magnetized permanent magnet block 2, a radially magnetized permanent magnet block 4, a non-magnetic miniature bearing 3 and a propeller 6. The head of the shell 1 is smooth, without protrusions and grooves in the middle. There is a spiral groove at the inner rear end of the fuselage shell 1, which is airtightly matched with the bottom 7 peripheral spiral grooves, so that it is convenient for the disassembly of the robot. The robot bottom 7 has a cavity 8, and an axial through hole is opened in the middle of the cavity 8. Filling the lubricating grease in the cavity 8 can prevent the liquid in the pipeline from entering the fuselage. The inner upper end of the shell 1 is made into two protrusions, and the axially magnetized permanent magnet block 2 is pasted on the two protrusions. The axially magnetized permanent magnet block 2 is connected with the ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More