

Device for automatic controlling final position of moving element
A technology of automatic control device and moving parts, applied in the direction of control using feedback, can solve the problems of high frequency conversion cost, high motor power, high cost, and achieve the effects of good performance, low control accuracy and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
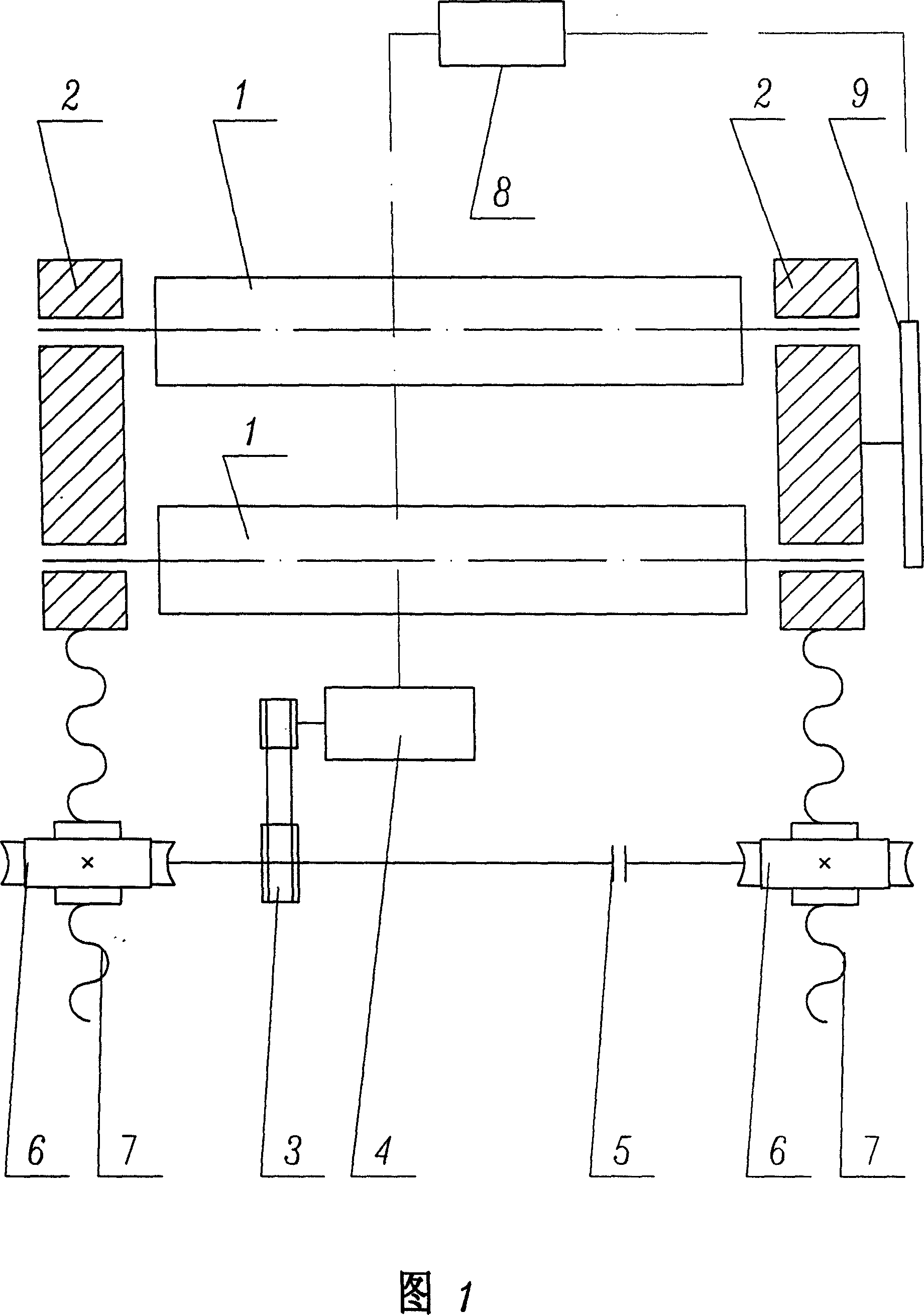
[0018] As shown in Figure 1, it is an embodiment of using the automatic control device for the final position of the moving parts for the horizontal movement of the lower roller of the horizontally adjustable roller plate bending machine. The transmission device is a sprocket 3, a connecting shaft and a flange connector 5, a worm gear pair 6, and a screw nut pair 7; the moving parts are the lower roller bearing housing 2 and the lower roller 1. The displacement sensor is located at the bearing seat 2 of the lower roller. The lower roller moves horizontally on the guide rail of the bed corresponding to the upper roller, and the double-speed motor 4 drives the lower roller bearing housing 2 and the The lower roller 1 moves horizontally, and the motor frequency conversion module is set in the control system 8. The size of the motor frequency conversion module is configured according to the low-speed pole power of the two-speed motor 4. The horizontal movement of the lower roller...
Embodiment 2
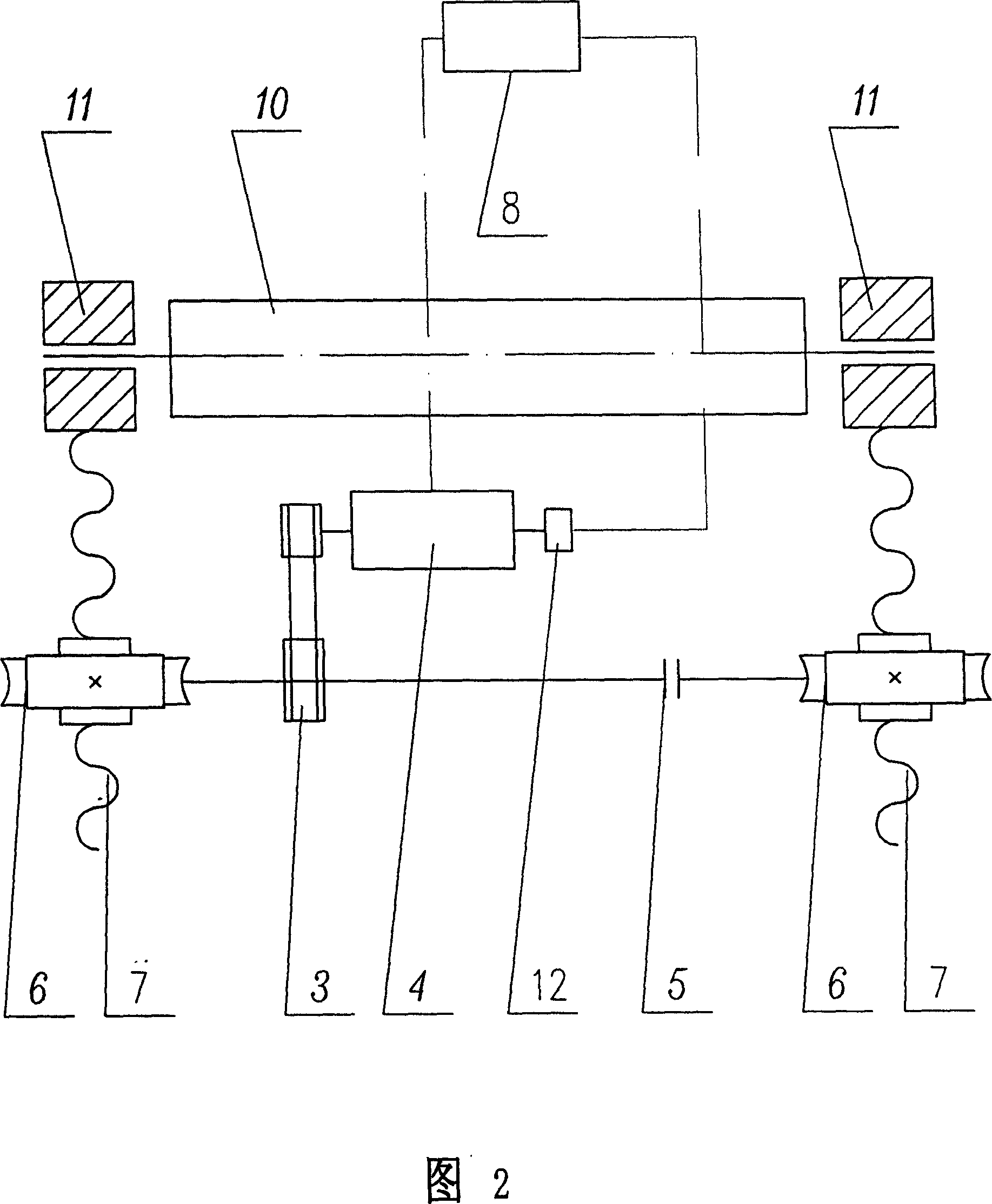
[0020] As shown in Figure 2, it is an embodiment of using the automatic control device for the final position of the moving parts for the mechanical lifting movement of the upper roller of the roller plate bending machine. The transmission device is a sprocket 3, a connecting shaft and a flange connector 5, a worm gear pair 6, and a screw nut pair 7; the moving parts are the upper roller bearing housing 11 and the upper roller 10. The upper roller moves up and down corresponding to the lower roller, and the double-speed motor 4 drives the upper roller bearing seat 11 and the upper roller 10 to move up and down through the sprocket 3, the connecting shaft and the flange connector 5, the worm gear pair 6, and the screw nut pair 7 , the displacement sensor (rotary encoder 12) is set on the shaft of the two-speed motor 4, the size of the motor frequency conversion module in the control system 8 is configured according to the low-speed pole configuration of the two-speed motor 4, an...
Embodiment 3
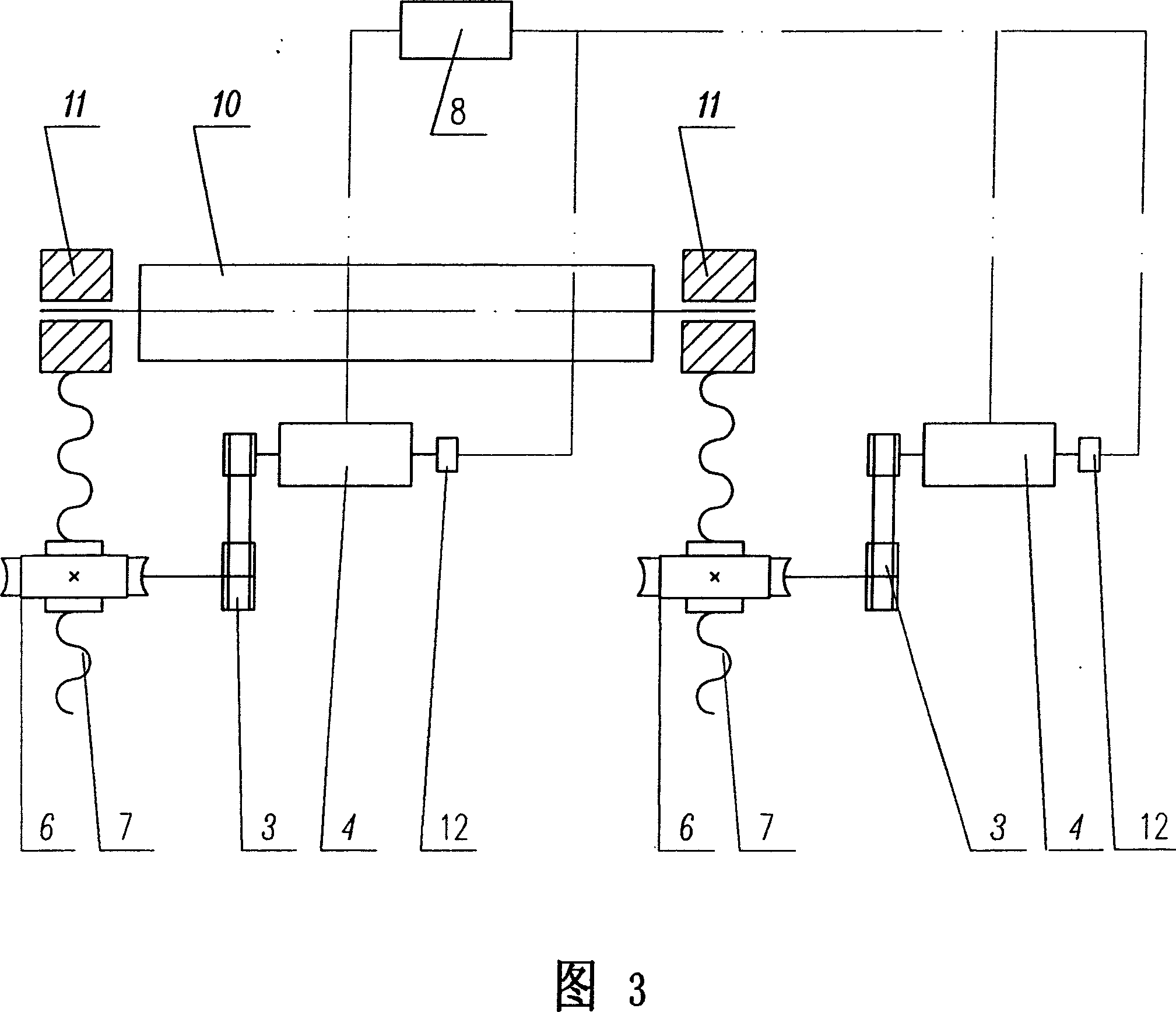
[0022] As shown in Figure 3, it is an embodiment of using the automatic control device for the final position of the moving part for the mechanical lifting movement of the upper roller of the roller plate bending machine. The transmission device is a sprocket 3, a connecting shaft and a flange connector 5, a worm gear pair 6, and a screw nut pair 7; the moving parts are the upper roller bearing housing 11 and the upper roller 10. The control system 8 uses the control device described in Embodiment 2 to control the upper roller bearing housings 11 at both ends of the upper roller 10, the displacement sensor (rotary encoder 12) is arranged on the shaft of the two-speed motor 4, and the control system 8 controls the upper roller 10. The final positions of the upper roll bearing housings 11 at both ends meet the requirements of the set value with a certain accuracy. Because the upper roller chocks 11 at the two ends of the upper roller 10 control the lifting respectively, the worm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More