

Human imitating clever hands driven by artificial pneumatic muscle
A pneumatic artificial muscle and dexterous hand technology, which is applied in the field of humanoid dexterous hands, can solve the problems of mechanical hand mechanism design difficulties, complex mechanisms, and small gripping force, and achieve a large finger movement space, simple overall structure, and large output force. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
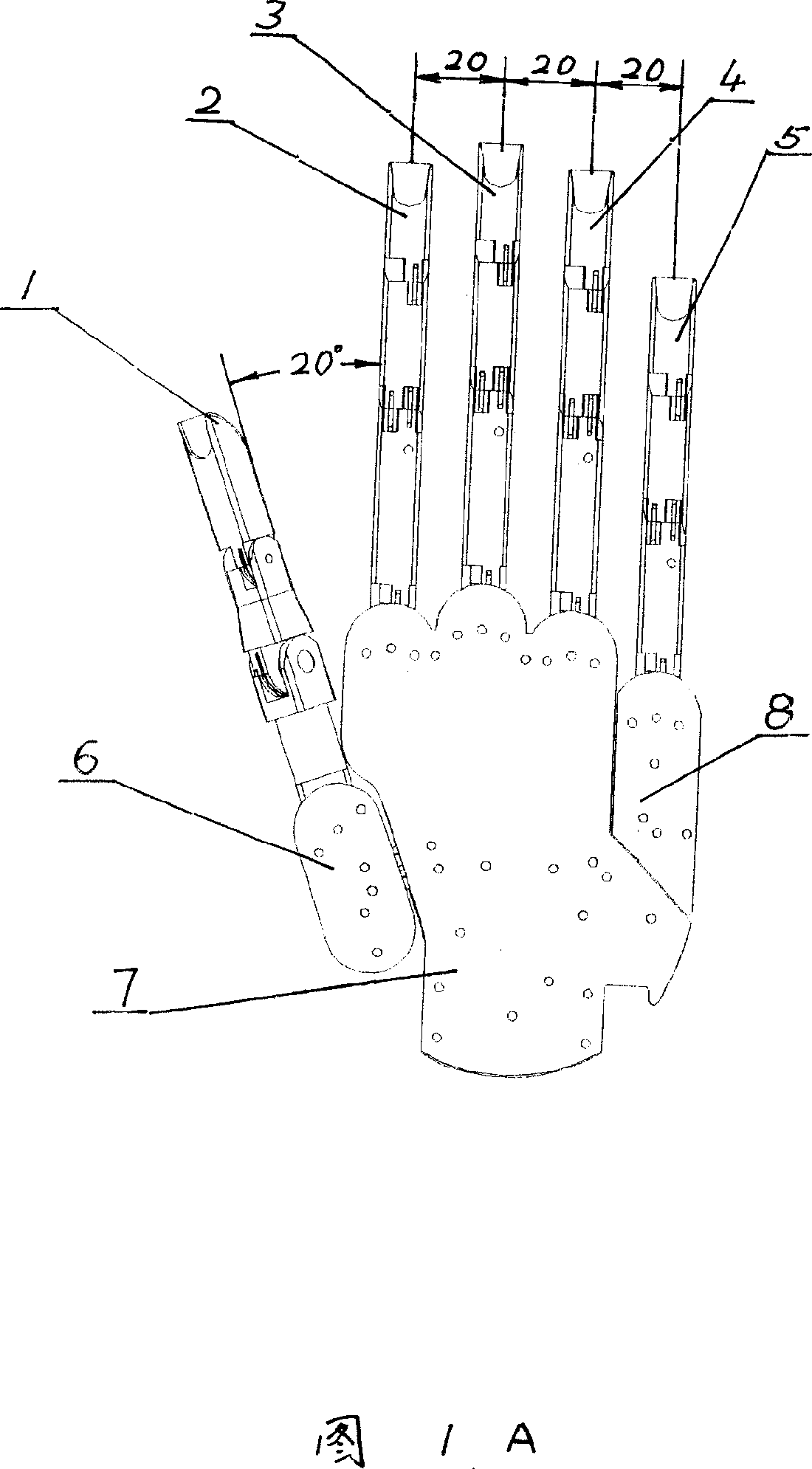
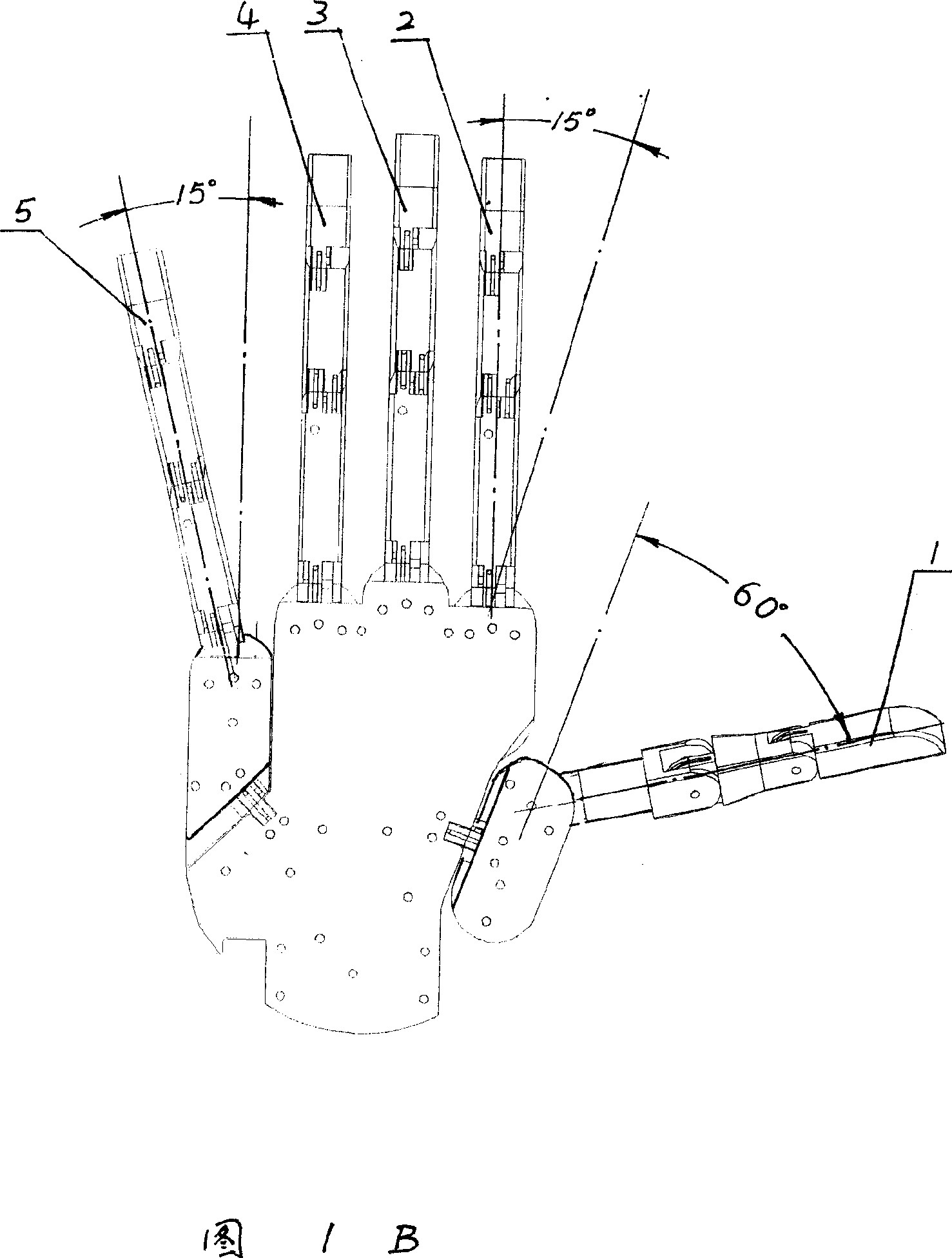
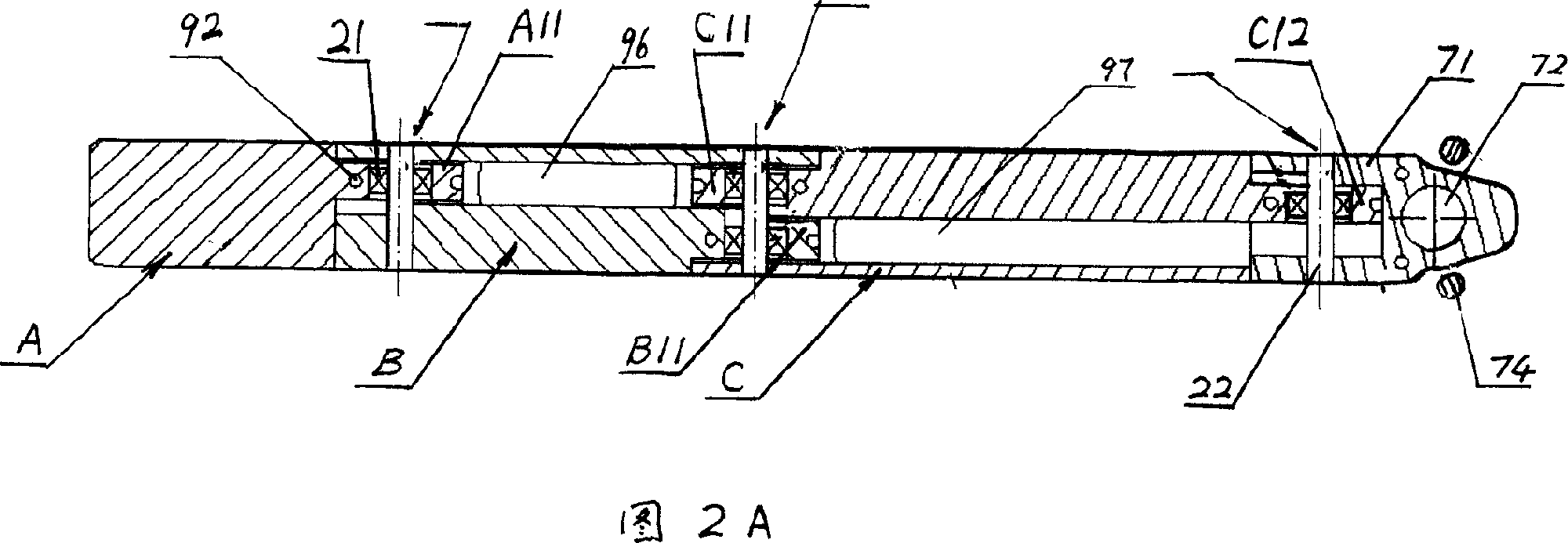
[0031] As shown in the figure, a humanoid dexterous hand structure driven by pneumatic artificial muscles is mainly composed of thumb bone 1, index finger bone 2, middle finger bone 3, ring finger bone 4, little finger bone 5, thumb connecting palm 6, middle palm 7, little finger Connect palm 8 and artificial tendon 9, wherein: index phalanx 2, middle phalanx 3, ring phalanx 4 and little phalanx 5 are all composed of far finger unit A, middle finger unit B and proximal finger unit C in the same structural form, Among them, the finger lengths of index phalanx 2, middle phalanx 3, and ring phalanx 4 are the same. Because the finger length of the proximal finger unit C that makes up little phalanx 5 is slightly shorter, the finger length of little phalanx 5 is slightly shorter; index phalanx 2 and middle phalanx 3 , the ring phalanx 4 and the little phalanx 5 are connected with the finger-palm connector 71 through the proximal finger unit C, and then connected with the middle palm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More