

Small-sized 6-track whole topographic form mobile robot
A mobile robot, all-terrain technology, applied in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve the problem of reducing the mobile robot's maneuvering speed, poor maneuverability and obstacle-crossing ability, and the robot chassis being crushed by gravel and flanges. problems such as living, to achieve the effect of enhancing flexibility and the ability to climb obstacles and saving space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing.
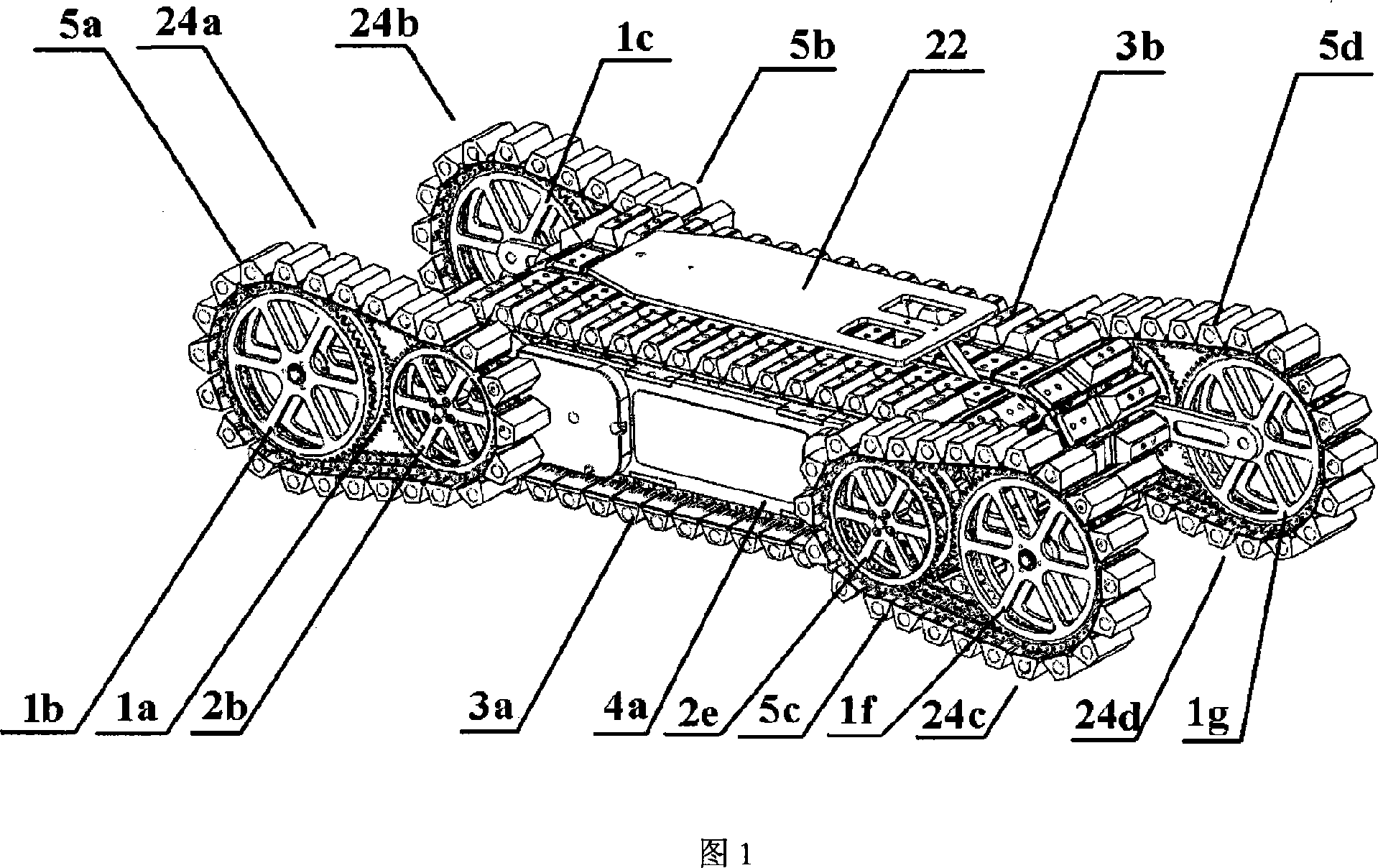
[0022] As shown in Figure 1, the present invention is a small six-track all-terrain mobile robot, including two sets of walking drive devices, four sets of swing arm assemblies and a fuselage frame. Robot left walking crawler belt 3a and right walking crawler belt 3b are symmetrically arranged left and right, covering the upper, lower, front and rear surfaces of robot fuselage frame 26, drive motor, control system and power supply are all included in left walking crawler belt 3a and right walking crawler belt. In the fuselage frame 26 covered by crawler belt 3b; left front swing arm drive unit 24a and right front swing arm drive unit 24b are installed on the left and right sides of the front end of the robot, left rear swing arm drive unit 24c and right rear swing arm drive unit 24d are installed behind the robot End left and right sides; left travel drive device 25a and ri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More