

Device, program, recording medium and method for preparing robot program
A robot and programming device technology, applied in the field of robot programming, can solve problems such as difficult automatic generation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the drawings, the same reference signs are attached to the same or similar structural elements.
[0045] In addition, in the following description, position-related terms such as "relative position", "absolute position", and "reference position" are generic terms for both position and posture unless otherwise specified.
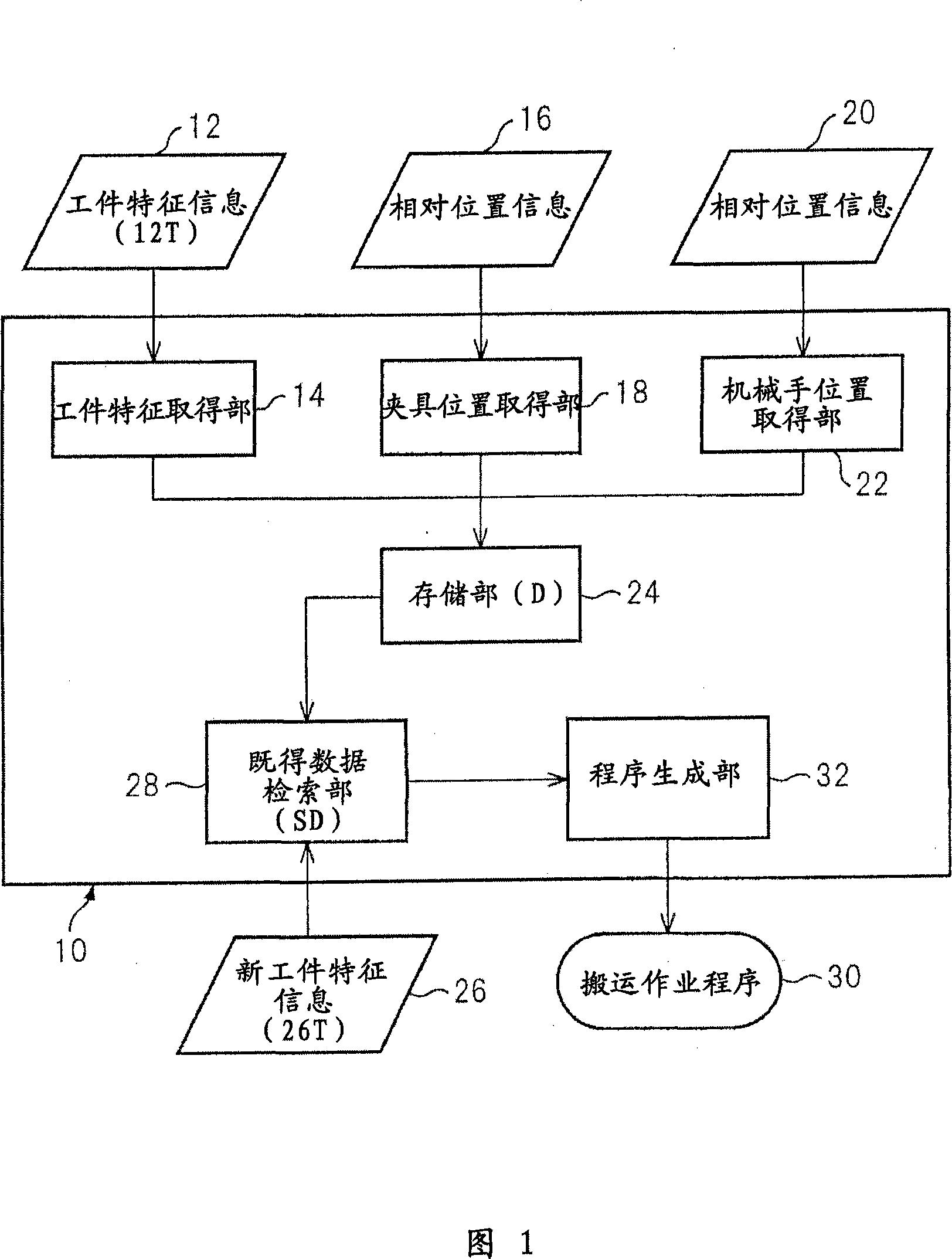
[0046] Referring to the drawings, FIG. 1 shows the basic structure of the robot programming device 10 of the present invention in a functional block diagram. The robot programming device 10 has a characteristic structure for generating a transfer operation program for causing a robot equipped with a manipulator to execute a workpiece transfer operation including at least one of an operation of mounting and removing a workpiece from a workpiece holder. That is, the robot programming device 10 includes the following parts: a workpiece feature...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More