

Control system for an articulated manipulator arm
A technology of control system and manipulator, applied in the direction of program control manipulator, manufacturing tool, manipulator, etc., can solve the problems of increasing manipulator cost, unreliable source, expensive pollution tolerance, etc., to achieve reliable and easy maintenance, accurate control, The effect of eliminating stability problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
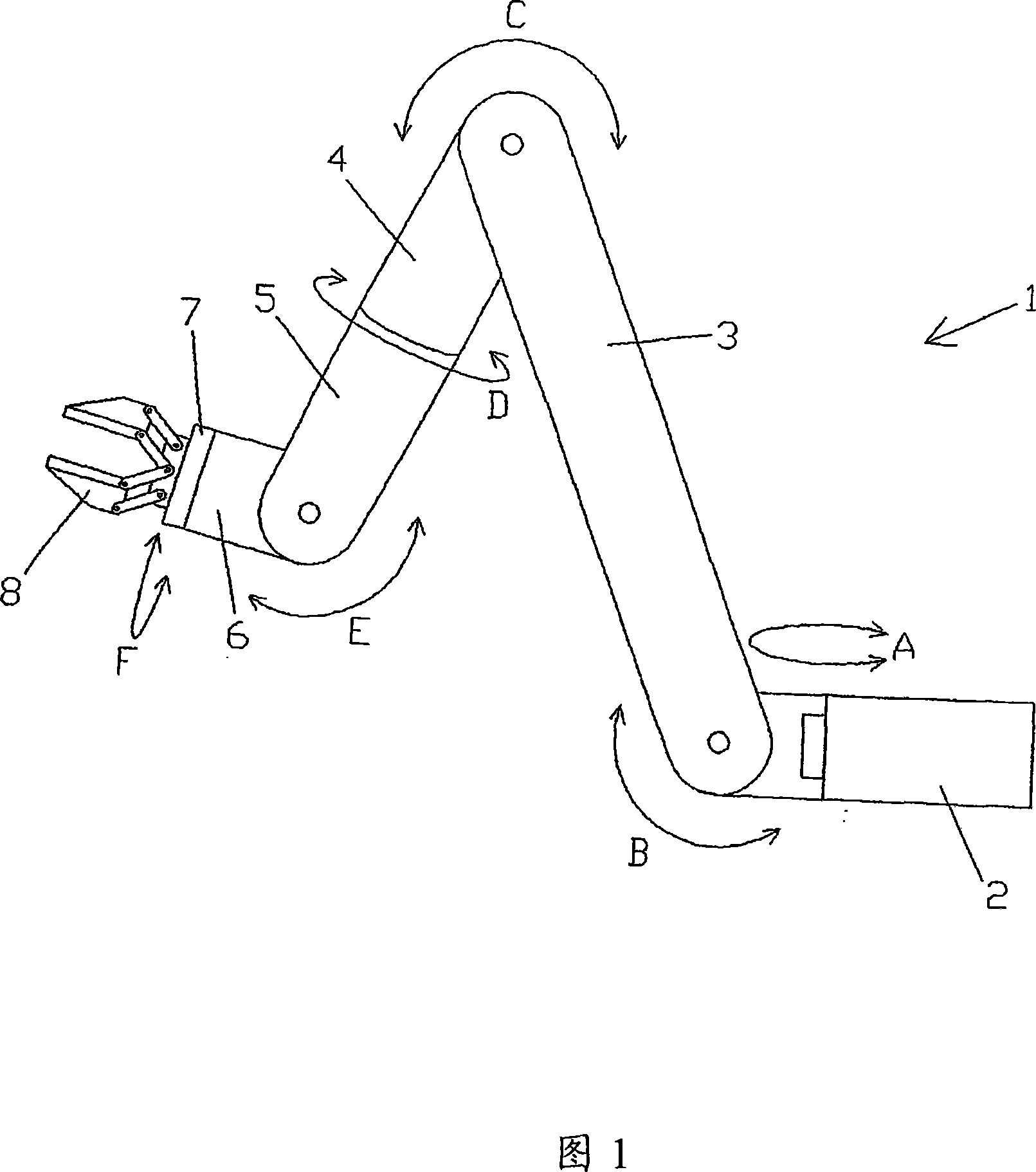
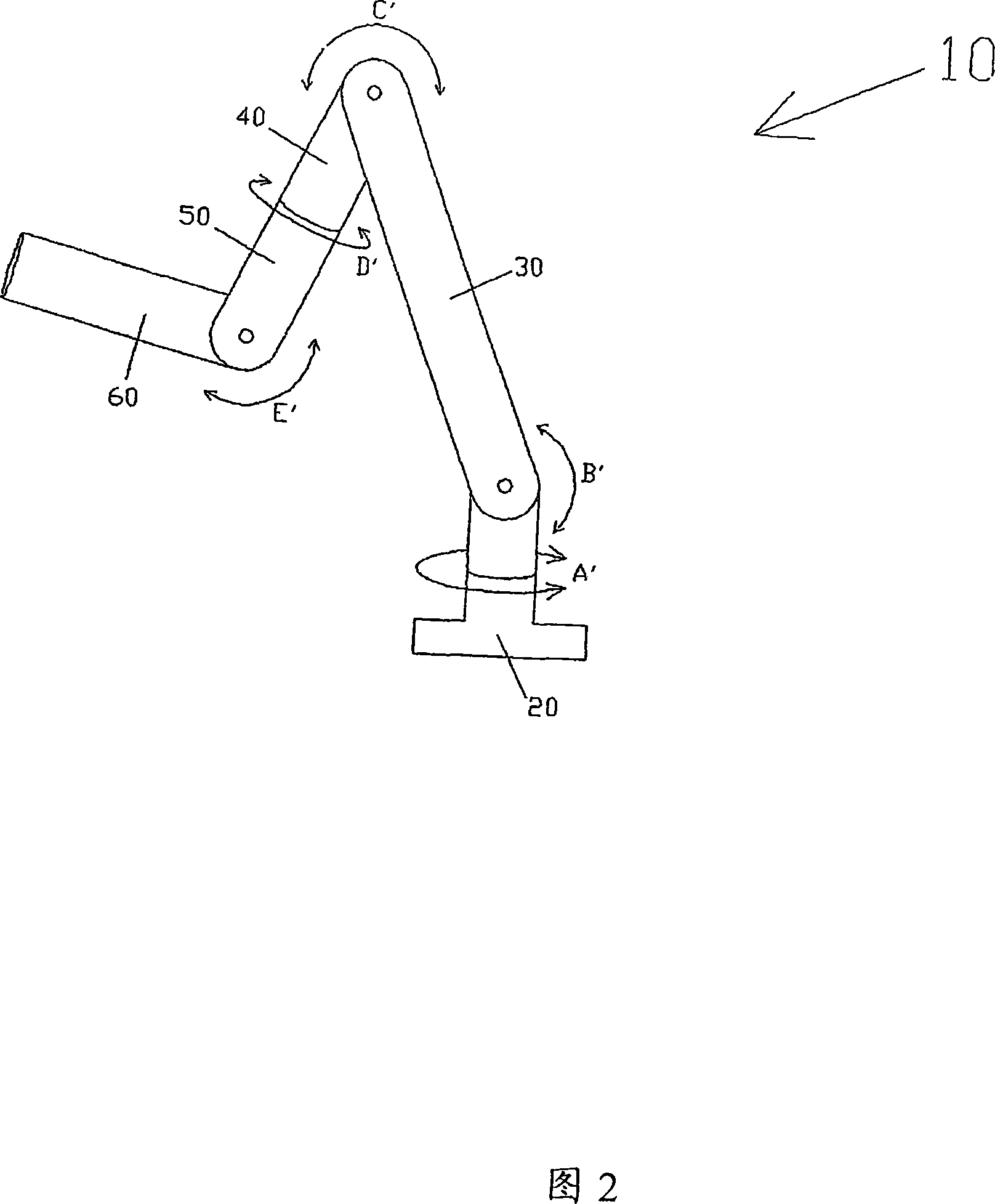
[0029]As shown in Fig. 2, the master arm 10 is a model or replica of the manipulator arm 1 called the slave arm. The master arm 10 has a number of articulated sections 20, 30, 40, 50, 60 interconnected by joints, each joint of the master arm 10 corresponding to a joint of a manipulator or slave arm 1 to be controlled. In the embodiment described here, the main arm 10 includes: a base 20; an upper arm section 30 pivotally connected to the base 20 for rotation about a shoulder swivel axis A' and a shoulder pitch axis B' ; the first forearm segment 40, the first forearm segment 40 is pivotally connected to the upper arm segment 30 for rotation around the elbow pitch axis C'; the second forearm segment 50, the second forearm segment 50 is rotatably mounted on the first forearm segment 40 for rotation about the forearm rotation or roll axis D'; and a wrist segment 60 pivotally connected to the second forearm segment 50 for rotation about the wrist pitch axis E' rotate. Each of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More