

Permanent magnetism minisize robot
A technology of micro-robots and robots, which is applied in the direction of mechanical equipment, pipes/pipe joints/fittings, special pipes, etc., can solve the problems of poor posture control and movement flexibility, achieve flexible movements, convenient operation, and solve mobility flexibility Poor effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
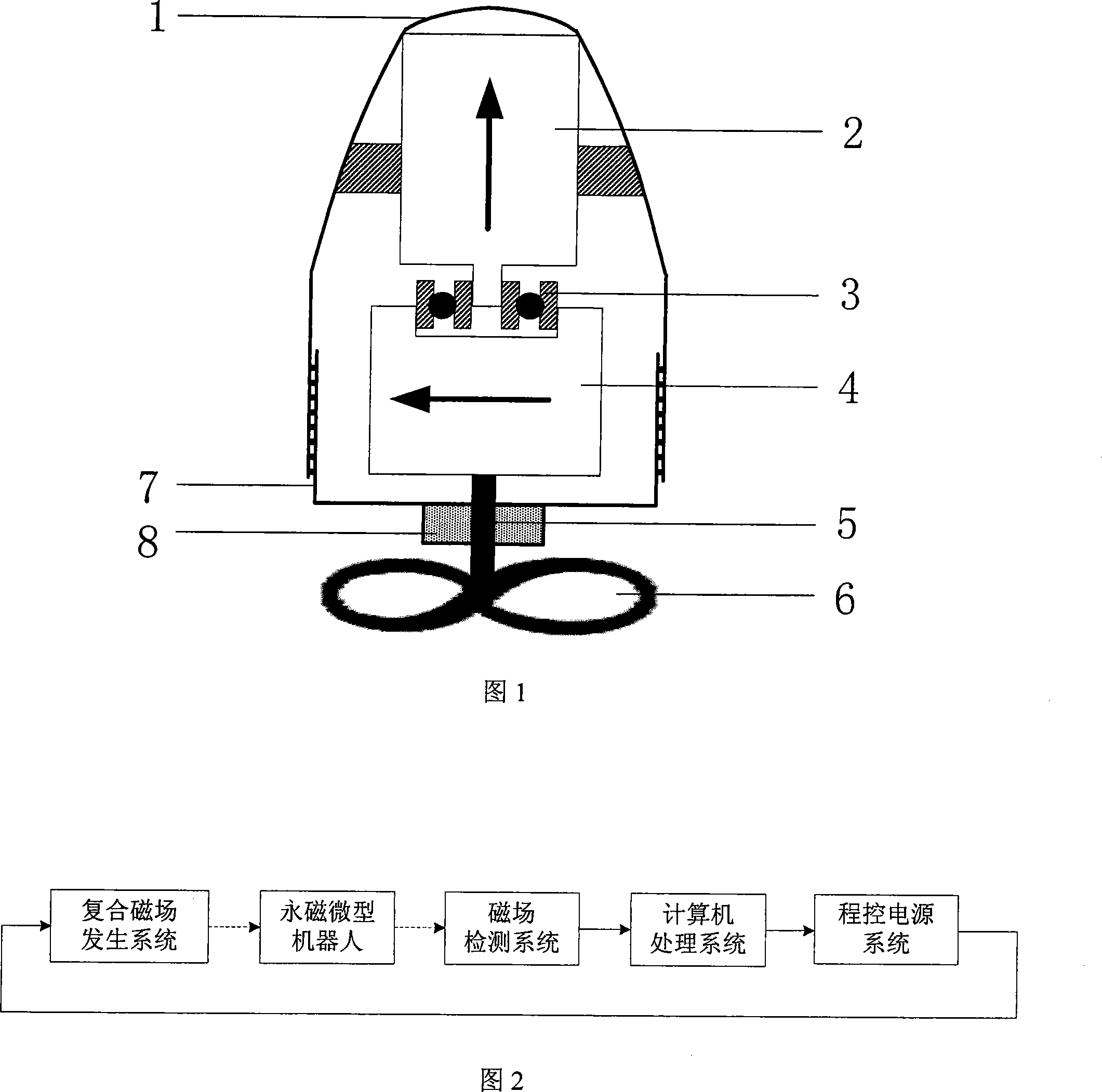
[0014] As shown in Figure 1. The permanent magnet micro-robot of the present invention is composed of a shell 1, an axially magnetized permanent magnet block 2, a radially magnetized permanent magnet block 4, a non-magnetic miniature bearing 3 and a propeller 6. The head of the shell 1 is smooth, without protrusions and grooves in the middle. There is a spiral groove at the inner rear end of the fuselage shell 1, which is airtightly matched with the bottom 7 peripheral spiral grooves, so that it is convenient for the disassembly of the robot. The robot bottom 7 has a cavity 8, and an axial through hole is opened in the middle of the cavity 8. Filling the lubricating grease in the cavity 8 can prevent the liquid in the pipeline from entering the fuselage. The inner upper end of the shell 1 is made into two protrusions, and the axially magnetized permanent magnet block 2 is pasted on the two protrusions. The axially magnetized permanent magnet block 2 is connected with the ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More