Data processing method for robot tactile sensing information syncretizing
A tactile sensing and data processing technology, applied in the field of robotics, to ensure accuracy and reliability, reliable estimation and judgment, and improve spatial resolution and clarity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
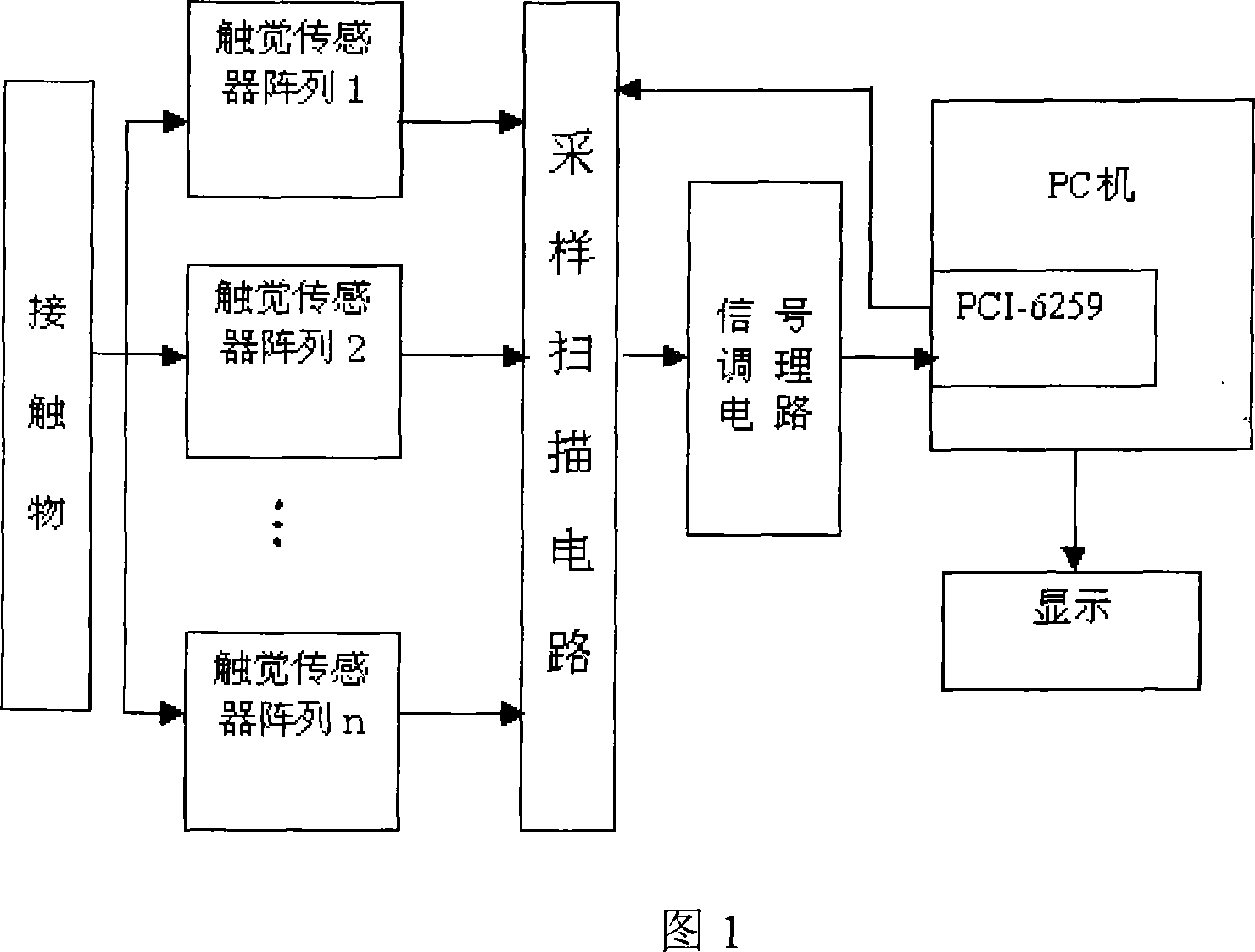
[0028] Fig. 1 is a schematic diagram of the principle of the present invention. These include robotic sensing clothing, sampling and scanning circuits, signal conditioning circuits, data acquisition cards and computers. The main part of the tactile clothing sensor system adopts a block array type, that is, the entire tactile clothing is divided into several array blocks, and the row and column leads of each block sensor are connected to the core component of the sampling scanning circuit - the multi-channel analog switch. block selection (analog switch block selection signal is generated by the host computer installed with NI’s PCI-6259 multi-function data acquisition card), and then the voltage signal of each sensing unit in the selected block sensor is sequentially sent to the The signal conditioning circuit, and then use the data acquisition card to colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More