

Construction mechanical arm photoelectric positioning apparatus
A technology for positioning devices and manipulators, which is applied in the direction of manipulators, optical devices, and measuring devices, and can solve the problems that the research results of photoelectric target linear positioning are still blank.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
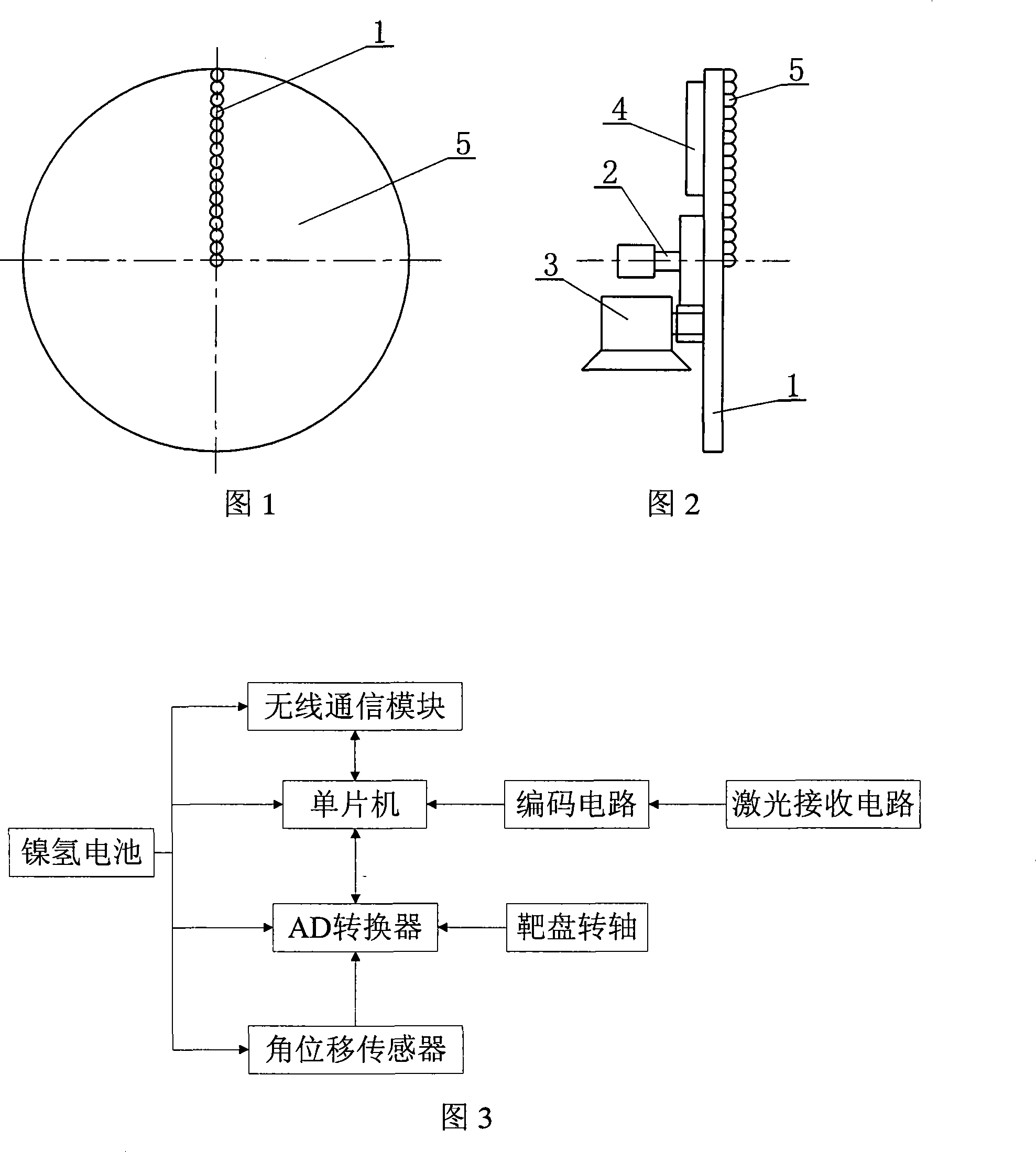
[0016] The present invention will be described in detail below with reference to the accompanying drawings.
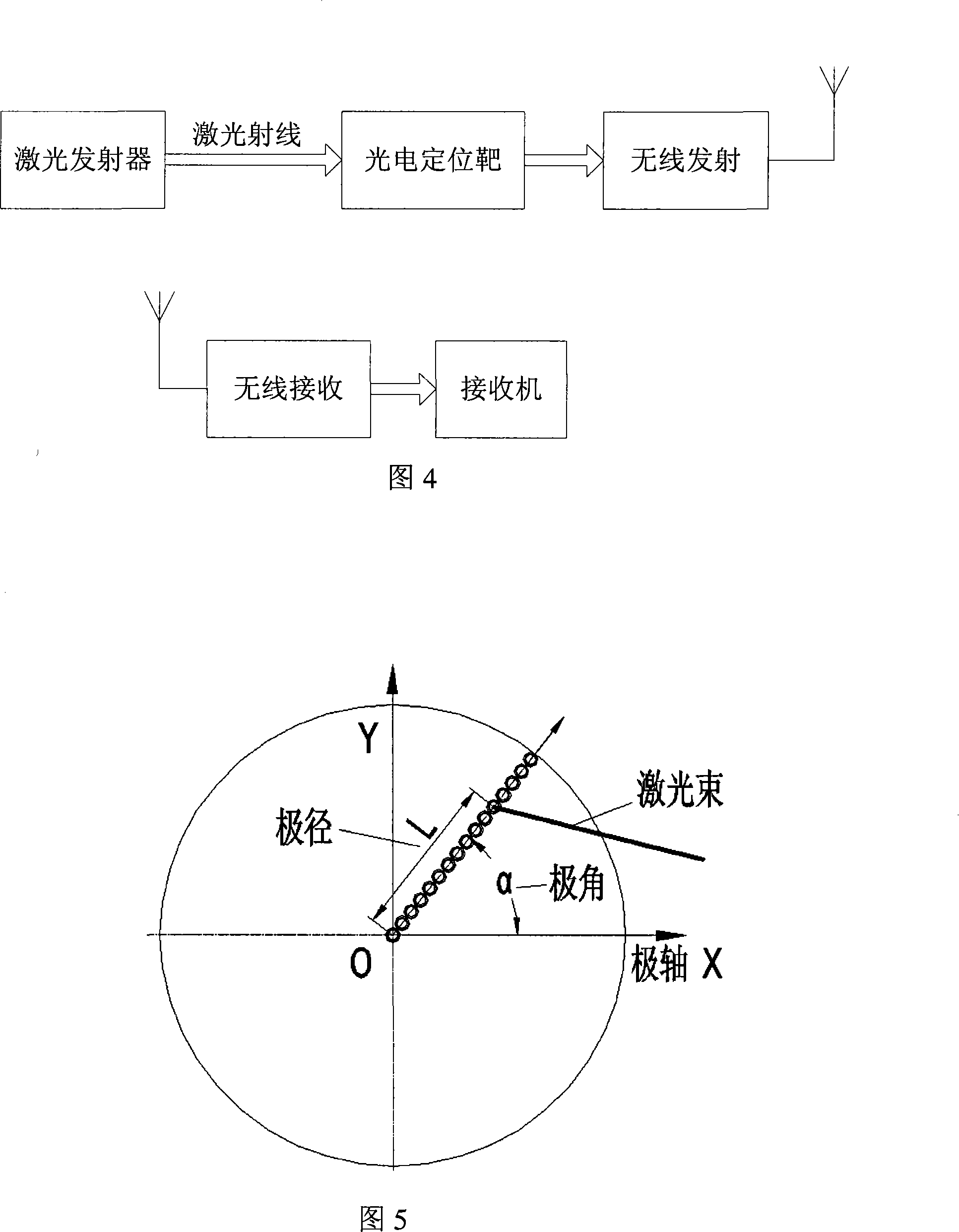
[0017] As shown in the figure, the photoelectric positioning device includes a hardware part and a software part. Its hardware part includes: a mechanical target disk 1 , a target disk rotating shaft 2 , a driving motor 3 , electronic components 4 and photosensitive diodes 5 . The outer surface of the mechanical target disk 1 is equipped with a photosensitive diode 5 or a photoelectric strip, and the inner surface is equipped with a drive motor 3, a target disk rotating shaft 2 and electronic components 4; the mechanical target disk is driven to rotate by the drive motor installed on the inner surface, and the electronic components The device 4 includes: a laser receiving circuit, an encoding circuit, an angular displacement sensor installed on the rotating shaft of the target disk, an AD converter, a single-chip microcomputer and a wireless communication module, and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More