

Robot flexibility clean-up paw
A robot and flexible technology, applied in the direction of manipulators, cleaning hollow objects, chemical instruments and methods, etc., can solve problems such as high labor intensity, secondary pollution inside the box, damage to the box or claws, etc., and achieve low equipment investment costs , The structure and principle are simple, and the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
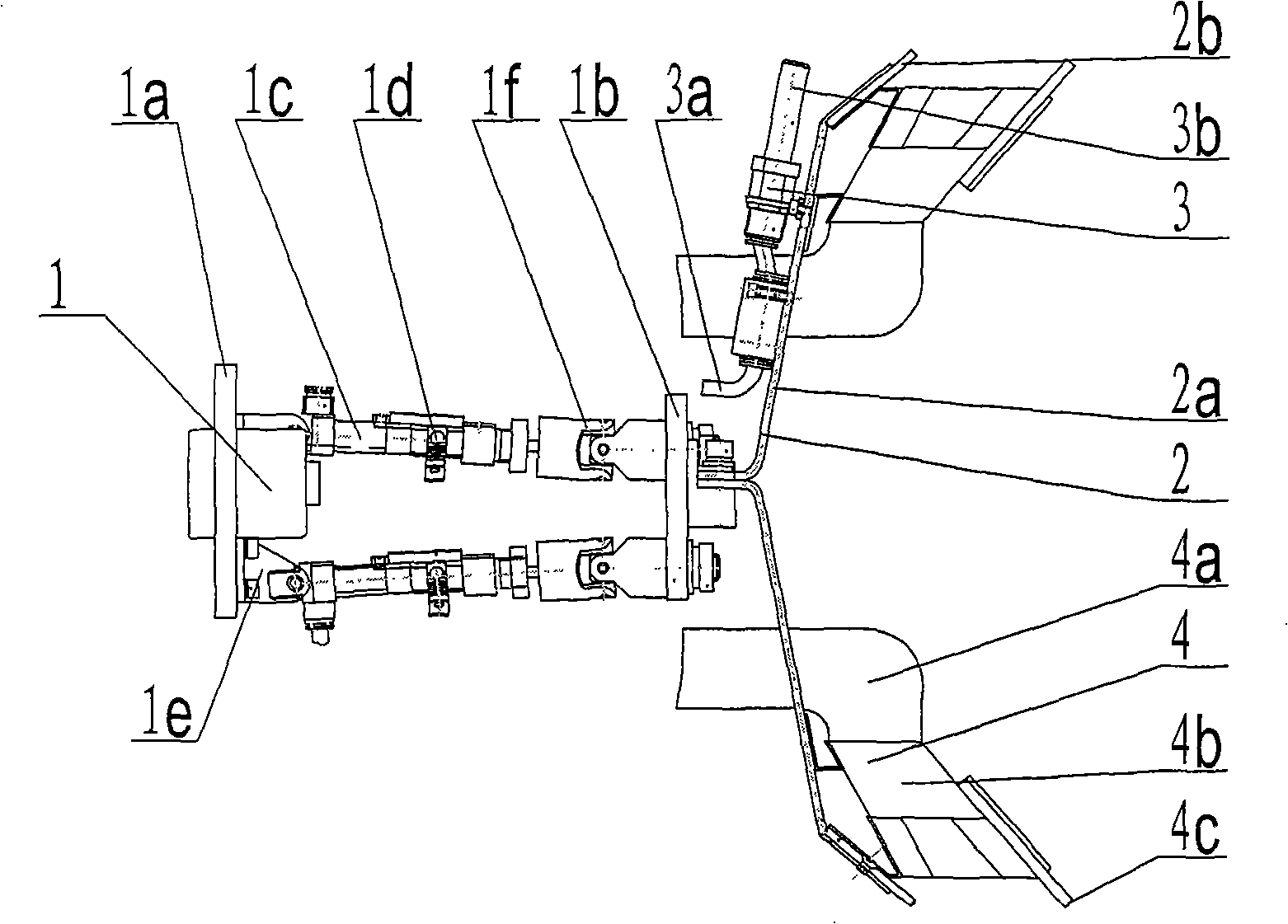
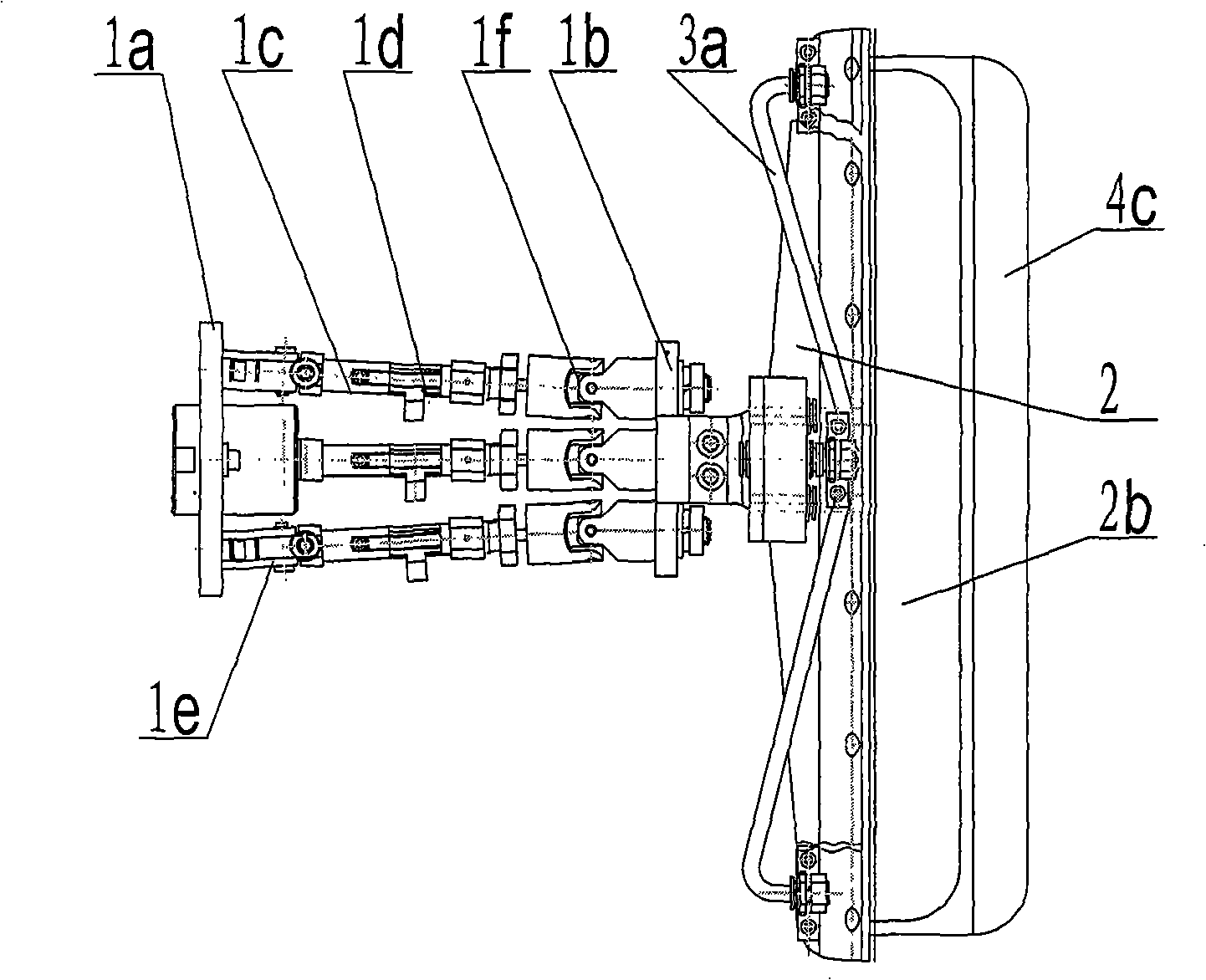
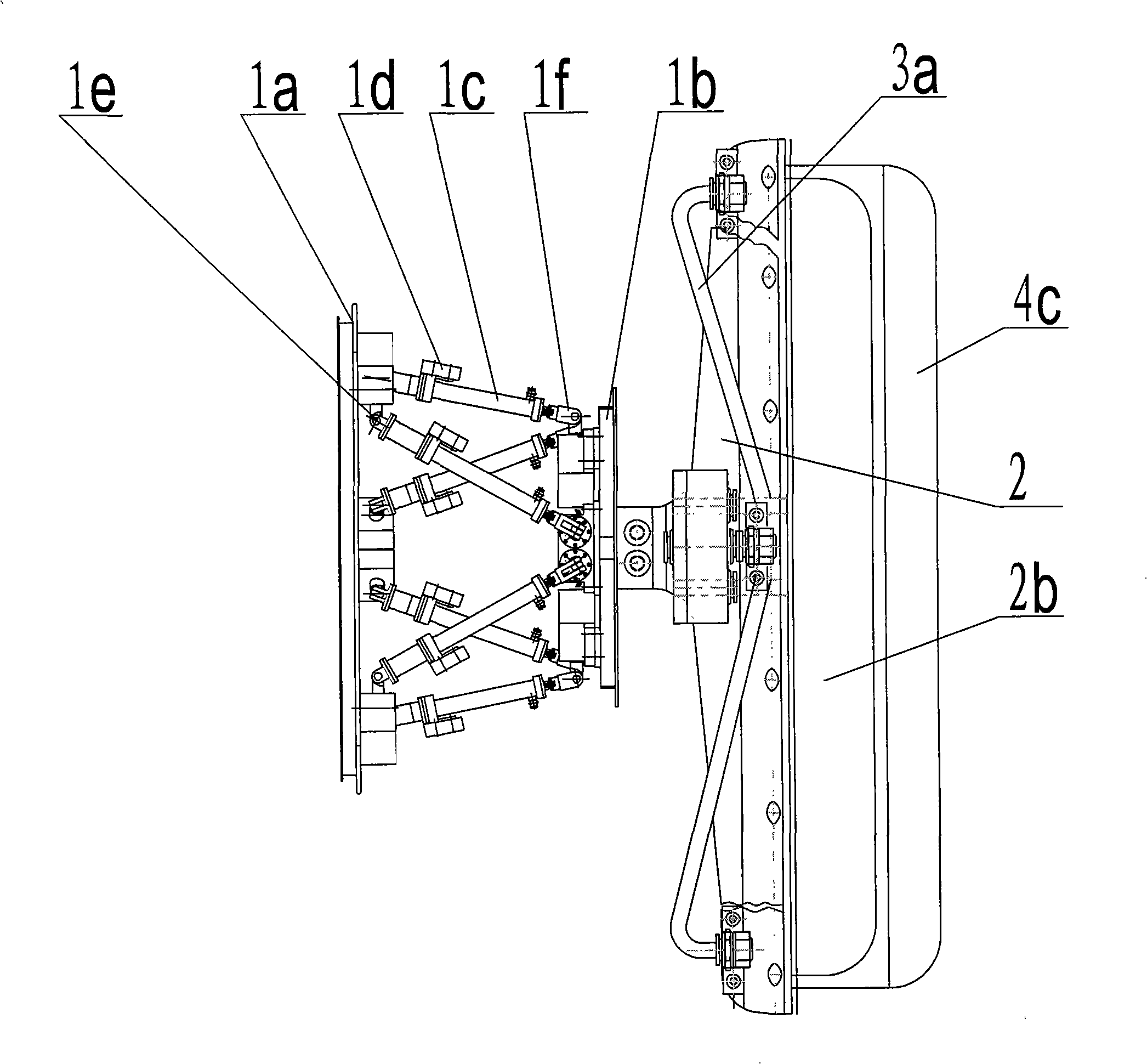
[0013] As shown in the figure, the present invention includes an anti-collision detection device 1 , a cleaning device 2 and a pneumatic blowing device 3 . The anti-collision detection device includes a mounting flange 1a and a connecting flange 1b at both ends, through the hinge mechanism 1e, 1f such as figure 1 landscape as shown or as figure 2 The telescopic kinematic pair 1c shown obliquely hinged between the mounting flange 1a and the connecting flange 1b is installed on the position detection sensor 1d of the telescopic kinematic pair 1c. Telescopic motion pair 1c can adopt air cylinder or hydraulic cylinder or electric cylinder or pneumatic spring or hydraulic spring, and present embodiment adopts air cylinder, and its cylinder tube is connected on the hinged mechanism 1e, and the end of piston rod is connected on the hinged mechanism 1f. The position detection sensor 1d is arranged on the cylinder body of the cylinder to detect the position of the cylinder piston. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More