

Anti-terrorist explosive-removal robot with multi-degree of freedom and large load manipulator
A technology of explosive-discharge robots and manipulators, applied in the field of anti-terrorism robots, can solve the problems of inability to handle explosives, difficulty in configuring and installing volumetric X-ray inspection instruments, and limited operating range, so as to achieve flexible and accurate clamping actions, wide operating range, The effect of fast processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
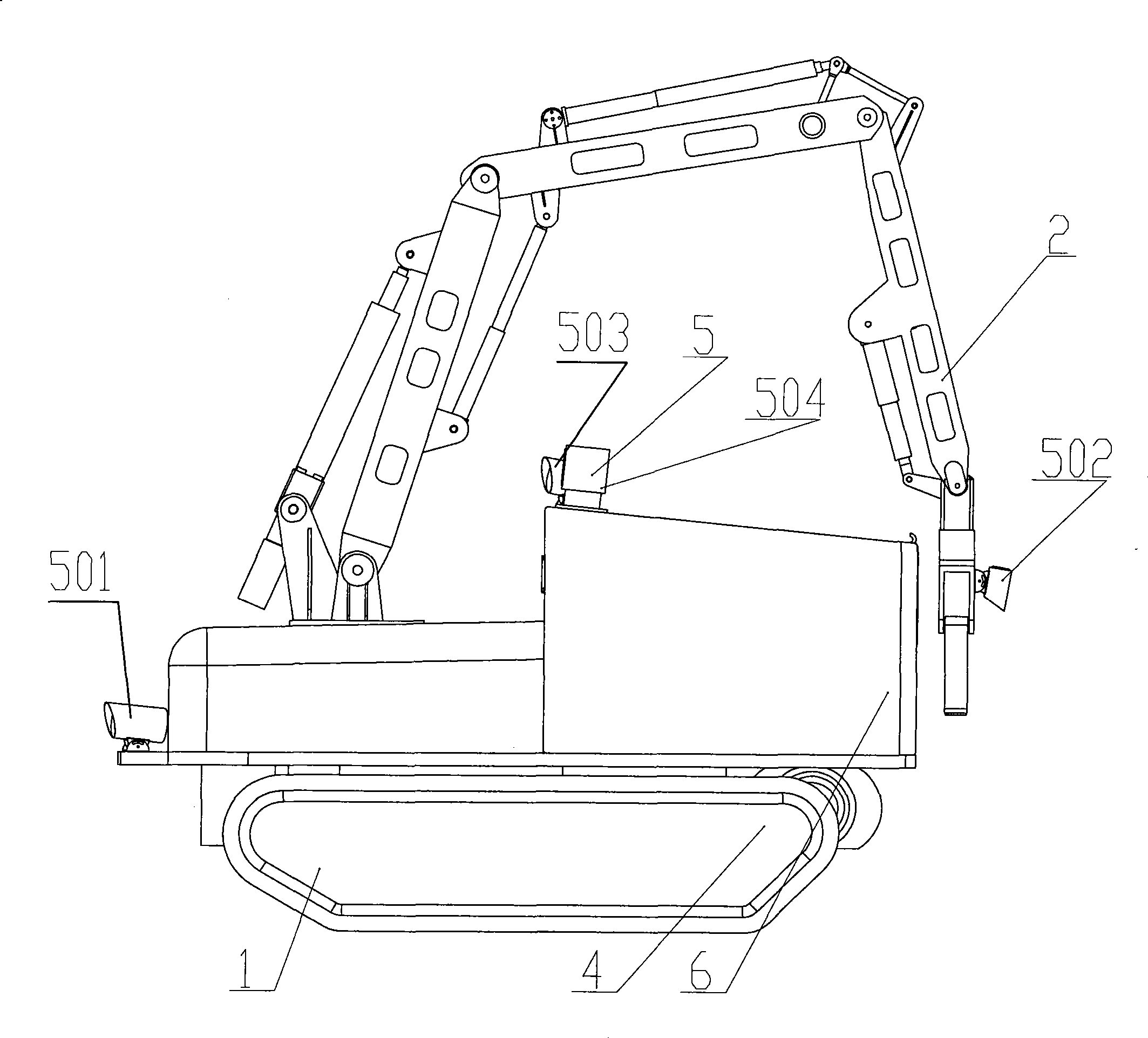
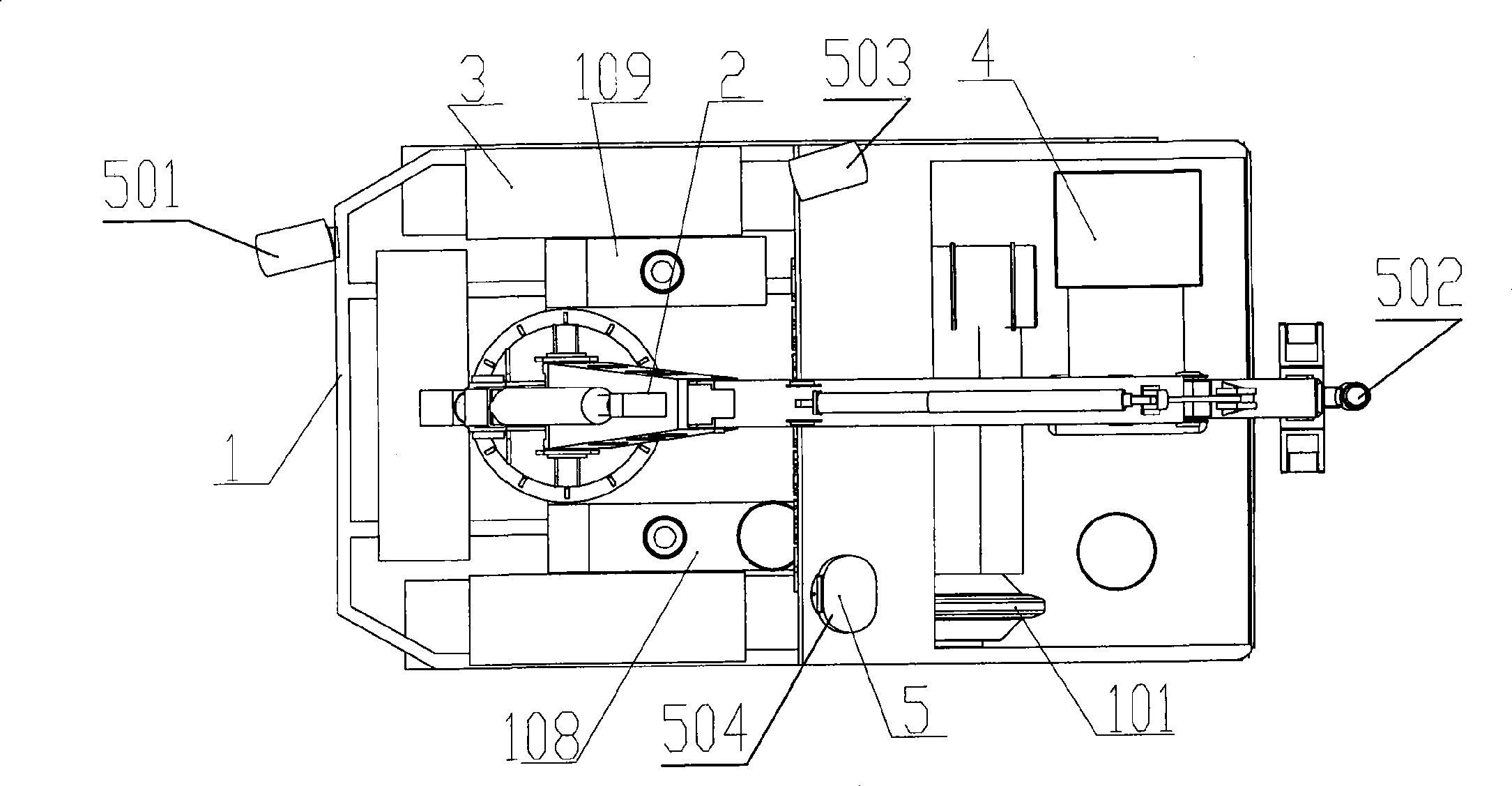
[0025] Embodiment 1: the following parts are pressed figure 1 Those skilled in the art can successfully implement the connection in the manner shown.
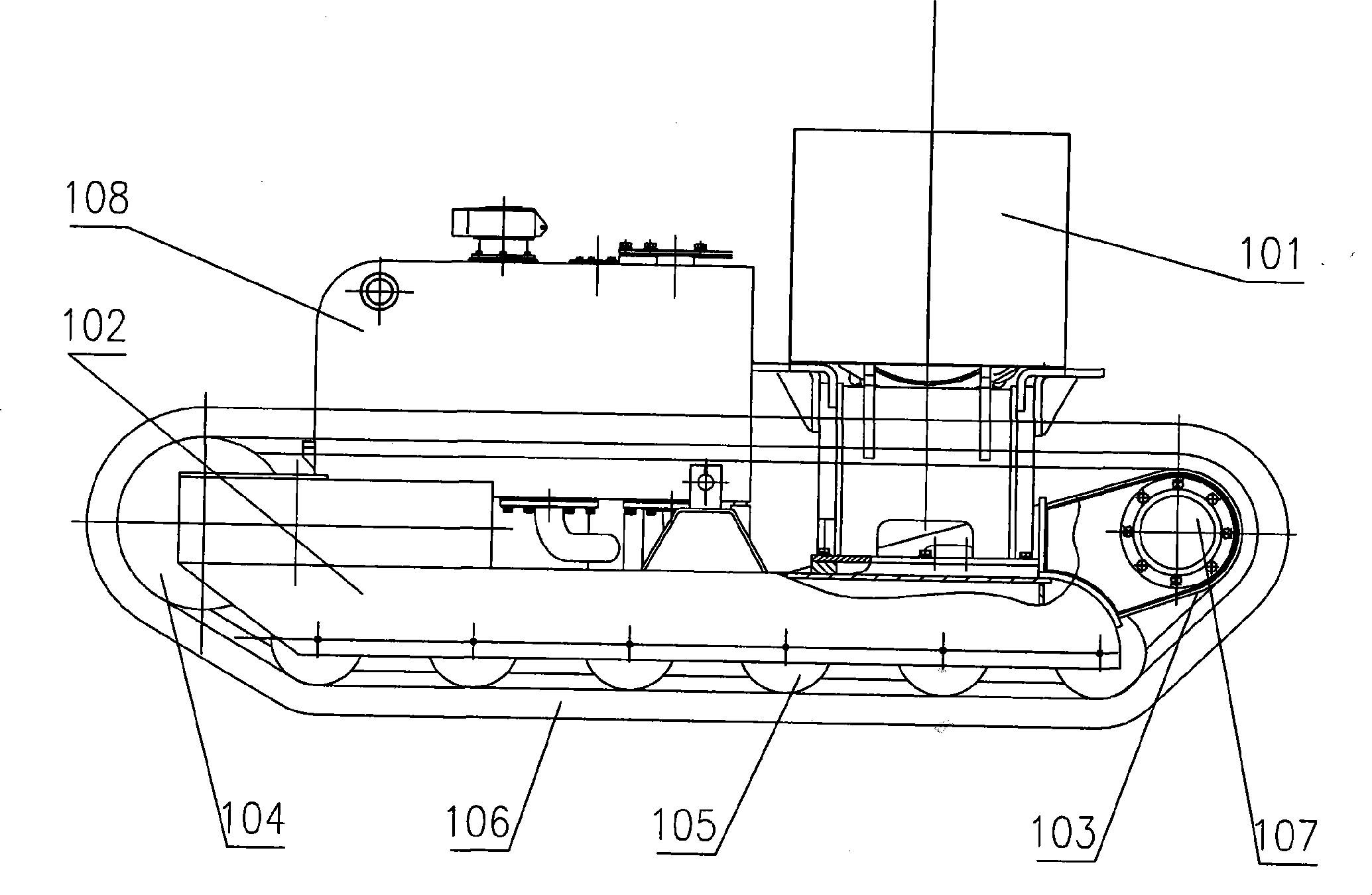
[0026] The walking chassis 1 adopts a crawler structure, and the crawler belt 106 is made of wear-resistant rubber. The engine 101 uses a BF3L diesel engine as a power source, which directly drives the hydraulic oil pump 110. The hydraulic oil pump 110 adopts LRR-025C-LS-26-20-NN-N-3 -C2NG-A6N-KNB-NNN-NNN, the hydraulic oil pump 110 drives the wheel side deceleration motor 107 to rotate, the wheel side deceleration motor 107 adopts the PHV-10-37-1-8502A wheel side decelerator, and the wheel side deceleration motor 107 drives the driving wheel 103 walks, and driving wheel 103 is casting, and material is Q235, drives guide wheel 104 and track roller 105 to rotate by crawler belt 106, realizes walking, and guide wheel 104 and track roller 105 are also Q235 material.
[0027] The material of the manipulator is Q235, and the overal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More