

Terminal operating system of robot and minimally invasive surgery robot with vision navigation
An operating system and robot technology, applied in the field of terminal operating system and visual navigation minimally invasive surgical robot, can solve the problems of complex system and high cost, and achieve the effect of low cost and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
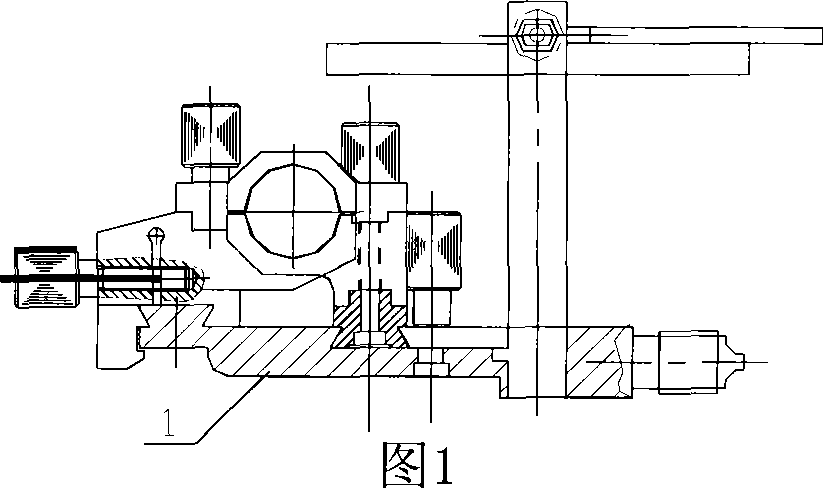
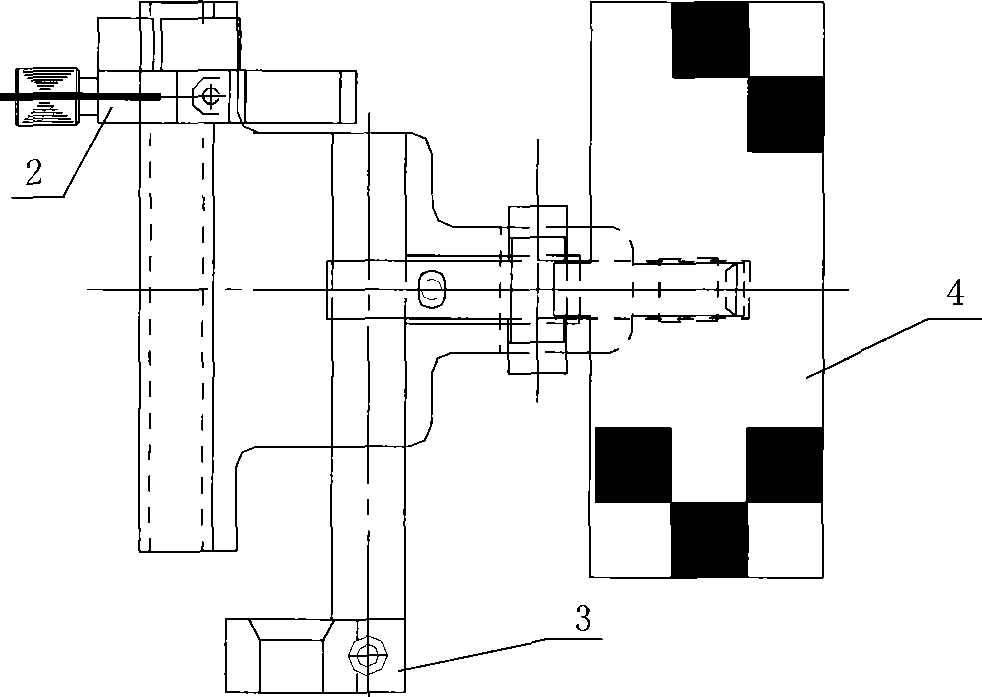
[0025] Such as Figure 4 , Figure 5 As shown, on the upper surface of the base plate 1, the dovetail groove 7 and the dovetail platform 6 are respectively located in the middle and one side of the base plate 1, the dovetail groove 7 is used for restraining and positioning the main locking frame 3, and the dovetail platform 6 is used for restraining and positioning the side Lock frame 2. The slideway directions of the dovetail groove 7 and the dovetail platform 6 are parallel to each other. The other side of the base plate 1 is a bolt 8 integrated with the base plate 1, and the bolt 8 is used to connect the end operating system of the present invention with the end of the robot.
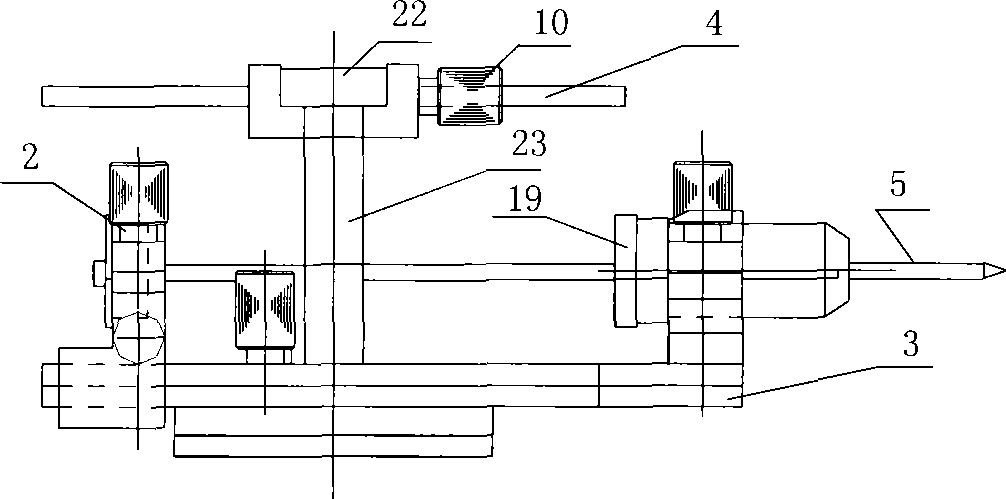
[0026] Such as Figure 6 , Figure 7 , Figure 8 As shown, the bottom of the side locking frame 2 is provided with a dovetail groove matching with the dovetail table 6, and the side locking frame 2 can move freely along the dovetail table 6, and the first manual screw 11 on the side locking fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More