

Welding robot two freedom-degree wrist centering mechanism
A welding robot and centering mechanism technology, applied in the directions of manipulators, welding equipment, auxiliary welding equipment, etc., can solve the problems of intuition and inconvenience, and achieve the effects of convenient processing, simple structure, and convenient installation and disassembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing, the present invention will be further described:
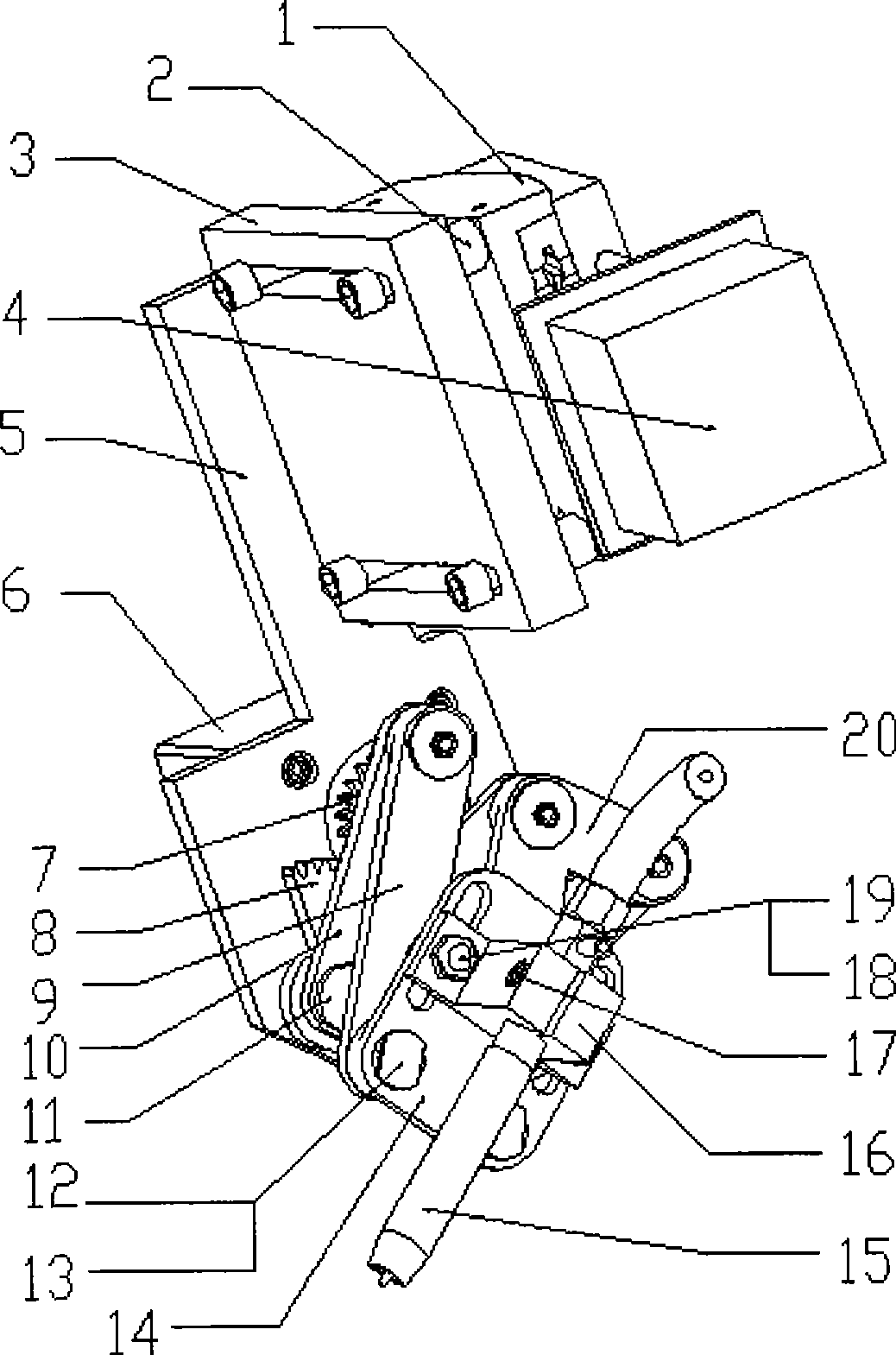
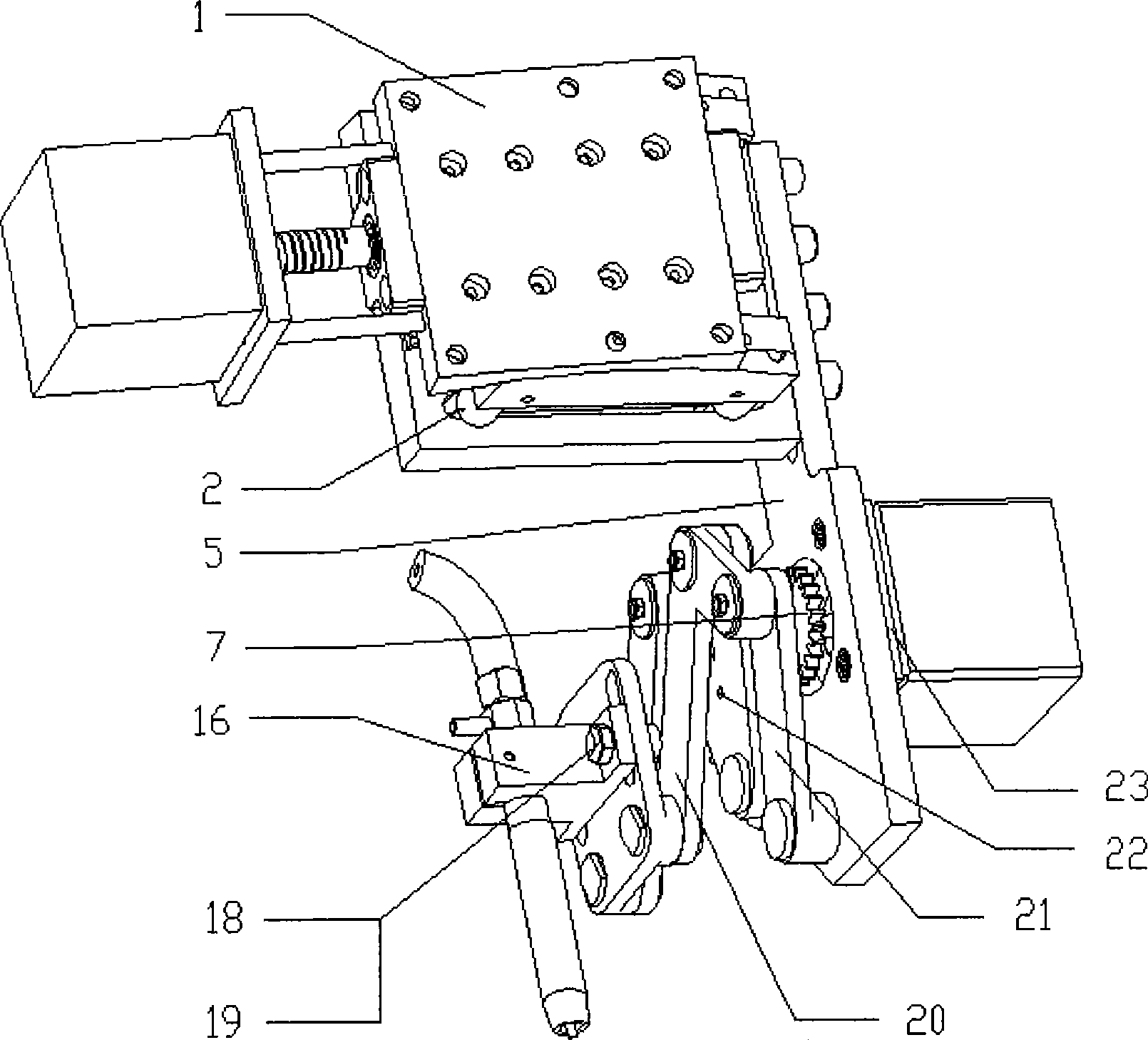
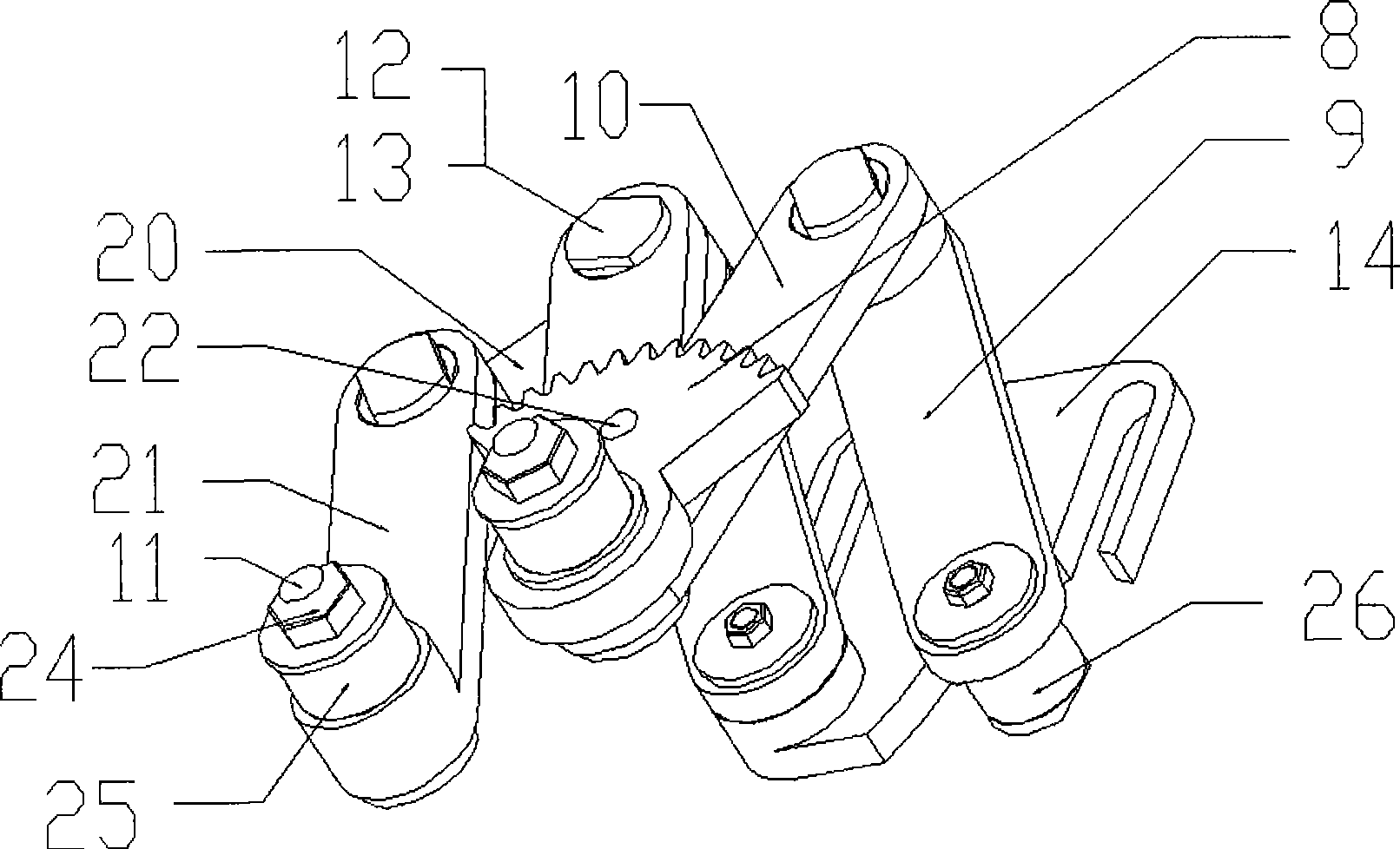
[0025] The mechanism of the present invention has two degrees of freedom of tilting and swinging. The swing is realized by the angle platform, and the tilt is realized by the link mechanism.
[0026] Such as figure 1 , figure 2 As shown, the angle stage is a mechanism that can realize circular motion. It is driven by a stepping motor to make the worm gear meshed with it move on its arc guide rail. This mechanism is one of the degrees of freedom of the welding robot wrist. Its trajectory is a circular arc with a known radius, such as Figure 4 As shown, its movable block can rotate around the O axis. The cross-sectional view of the angle platform is as follows Figure 5 shown.
[0027] The angle table mechanism 1 is fixed to the angle table connecting plate 3 with the hexagon socket head cap screws after being raised to a certain height by the angle table cushion b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More