

Under-actuated bipod walking robot hip-joint mechanism
A walking robot and hip joint technology, applied in the fields of mechanics, cybernetics, electronics, computer numerical control, and mechanics, can solve problems such as no separation, and achieve the effect of simple mechanism and high energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
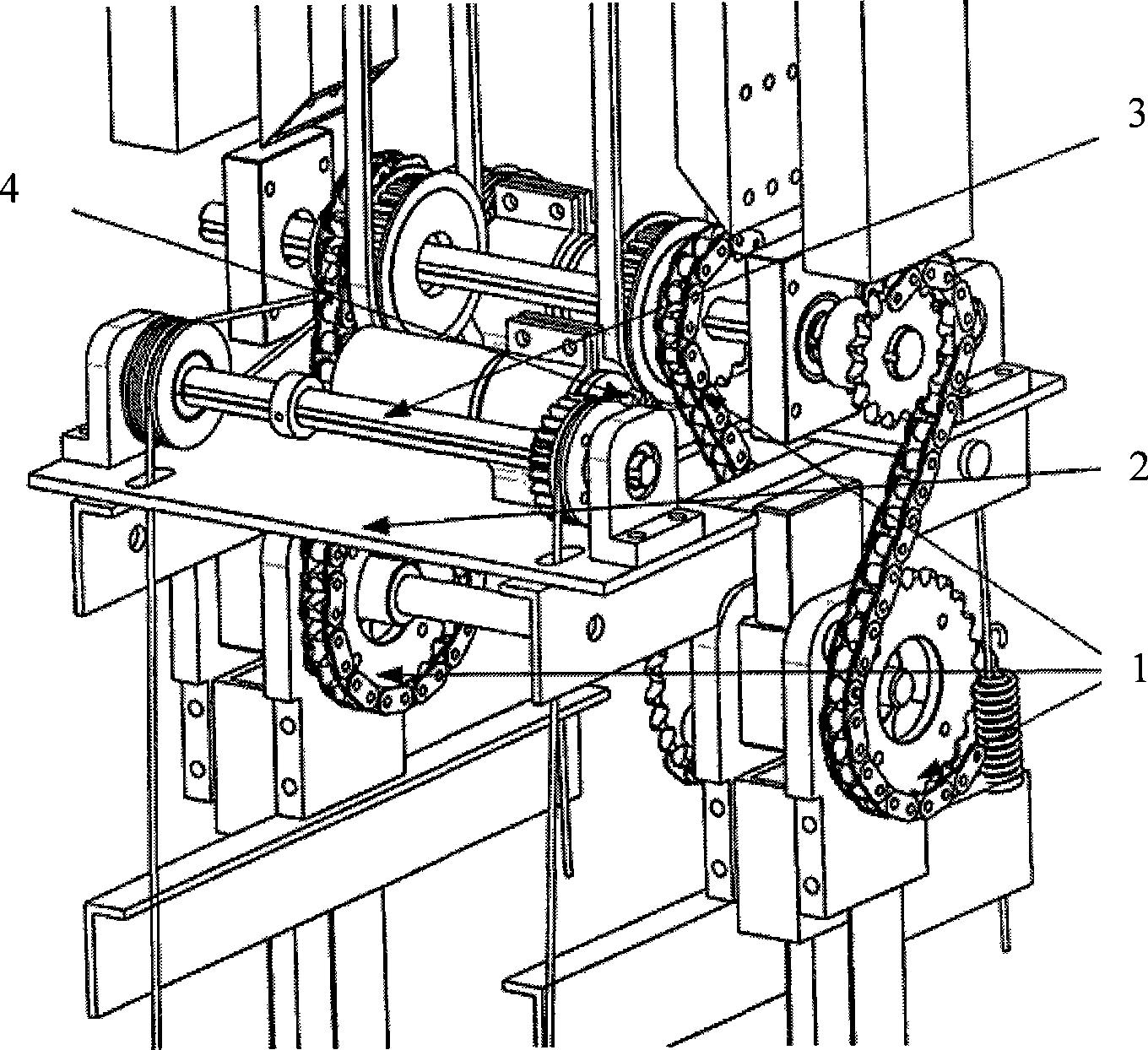
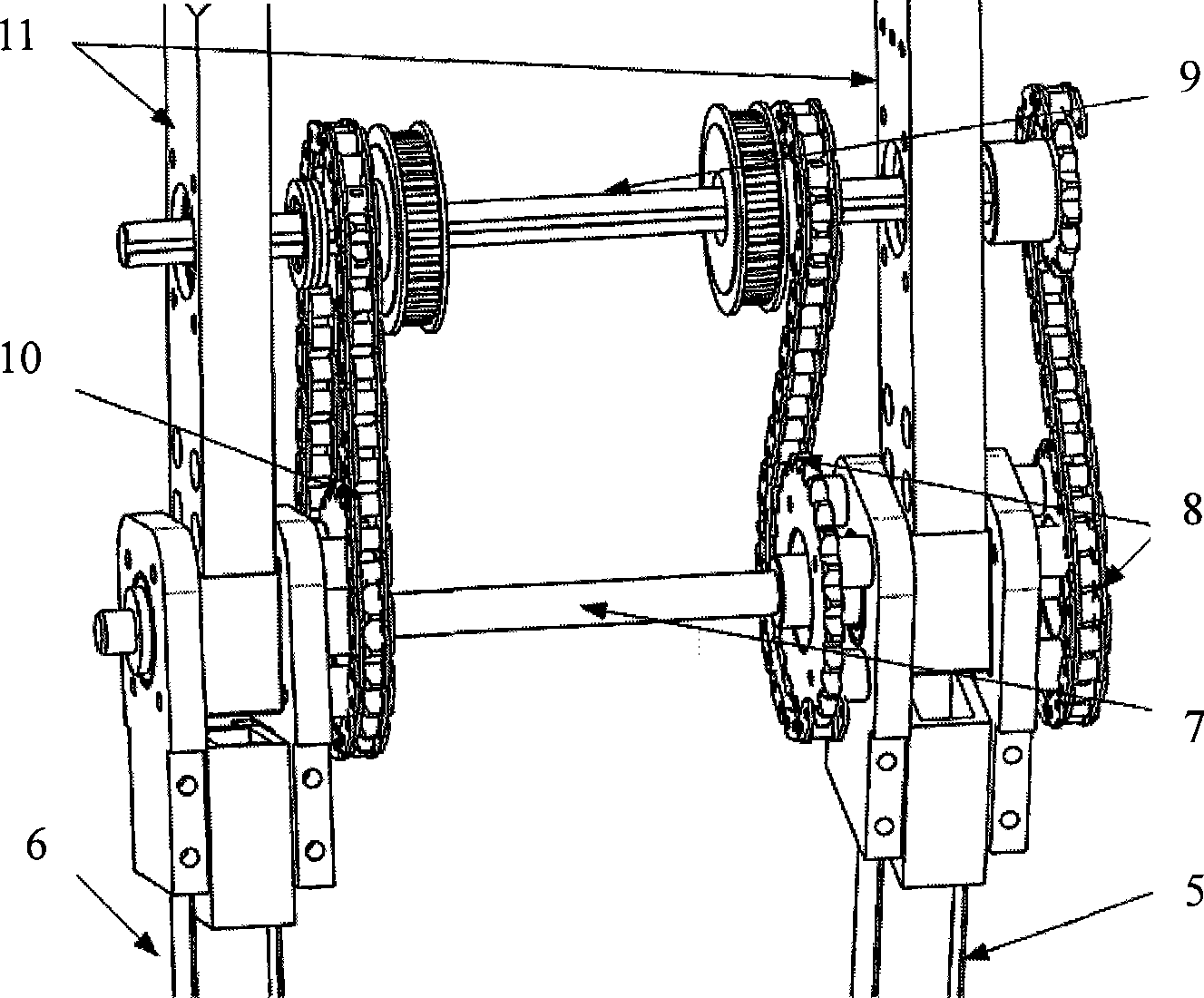
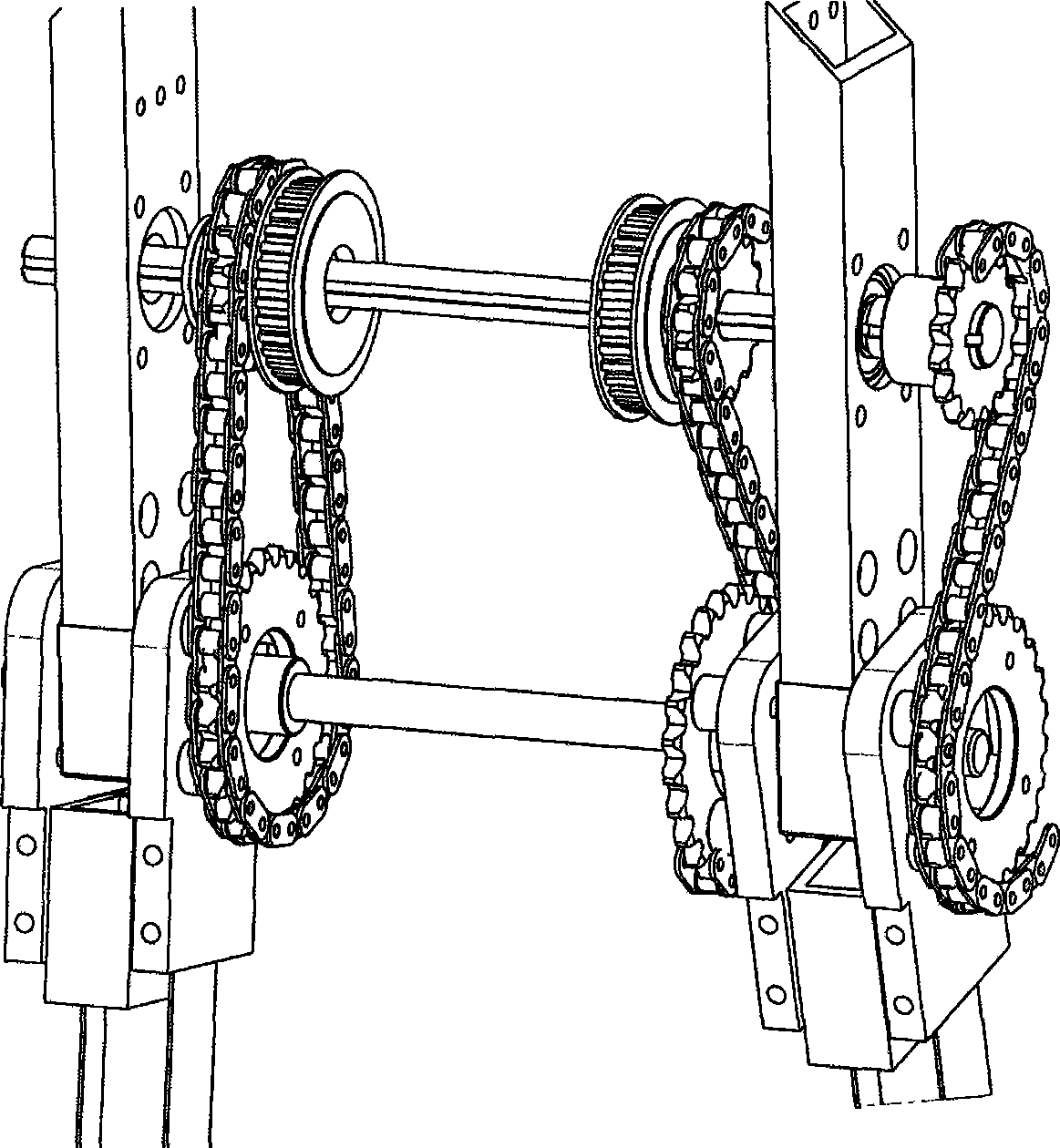
[0031] The hip joint integrated linkage drive mechanism of the present invention can support the upper body and provide the degree of freedom to connect the legs while exerting a relative driving moment between the legs, and can realize the control of the upper body motion during the robot walking motion. In the design of footed robots, the hip joint mechanism is complex, the energy efficiency of the drive system is low, and the control is complex. From the mechanism, the high energy efficiency and dynamic and stable walking of the underactuated biped walking robot are guaranteed. The technical scheme and working principle of the present invention will be further described in detail below in conjunction with the embodiments shown in the accompanying drawings.
[0032] An underactuated bipedal walking robot with integrated linkage-driven hip joint, mainly composed of an angle bisector linkage mechanism, a hip joint component mounting plate, a bidirectional transmission system an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More