

Autonomous type underwater robot by simultaneous positioning and map constructing method
An underwater robot and map construction technology, which is applied to underwater ships, underwater operation equipment, instruments, etc., can solve problems such as small positioning range, and achieve the effects of low manufacturing cost, reducing error accumulation and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
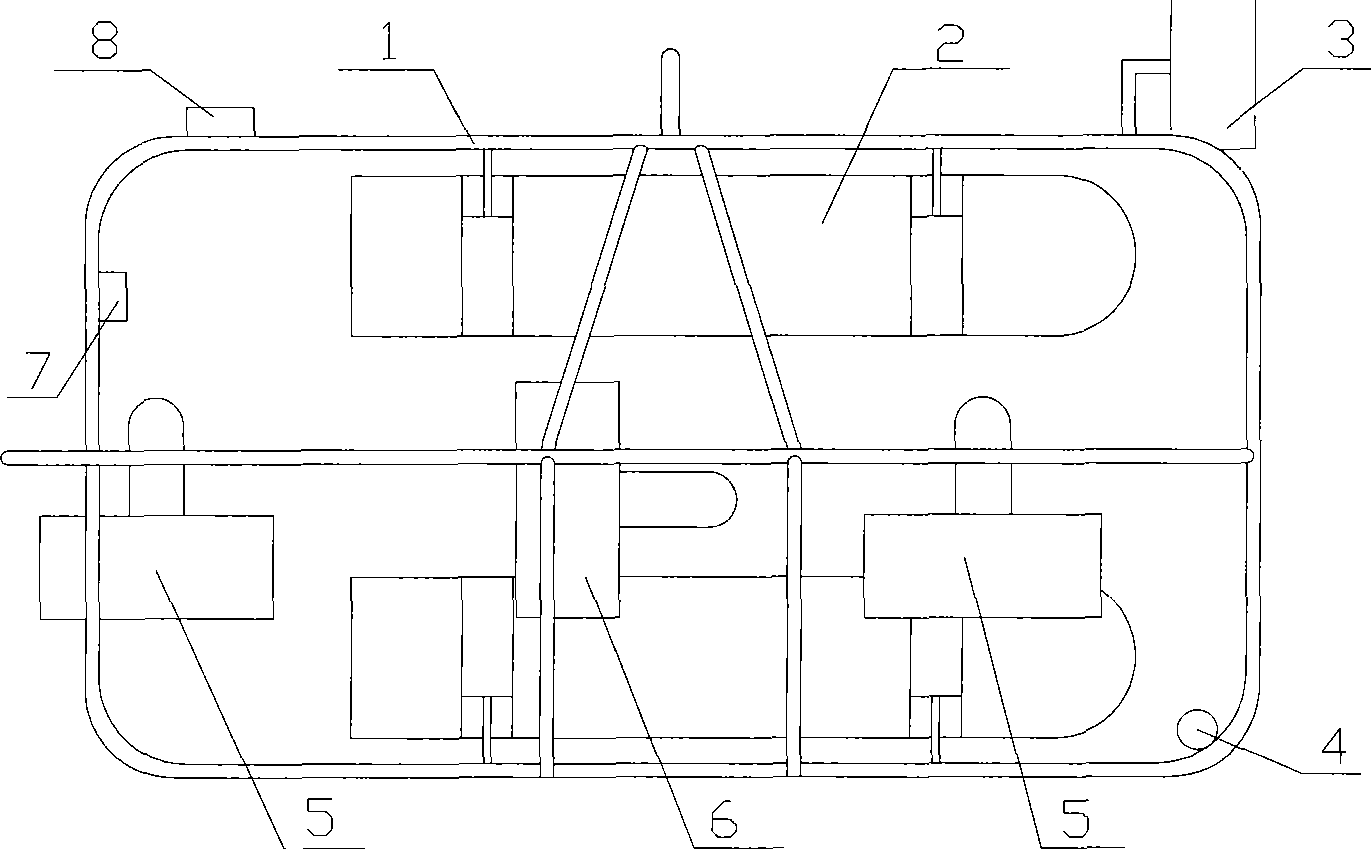
[0027] As shown in 1, the present invention adopts an open-frame mechanical structure, the upper and lower double-layer pressure chambers 2 are fixed on the outer frame 1, and five underwater propellers are arranged, including three vertical propellers 5 and two horizontal propellers 6 , where vertical propellers 5 are respectively arranged on the left and right symmetrical sides of the front part of the outer frame 1, and a narrow-beam scanning imaging sonar 3 is arranged on the upper part of the front part of the outer frame 1 at the same time, and a common Collision avoidance sonar 4; the left and right symmetrical sides of outer frame 1 middle part are respectively fixed horizontal direction thruster 6; The upper rear portion of outer frame 1 is provided with GPS antenna 8, and its rear middle position is provided with a vertical direction thruster 5, A pressure sensor 7 is installed above the propeller.
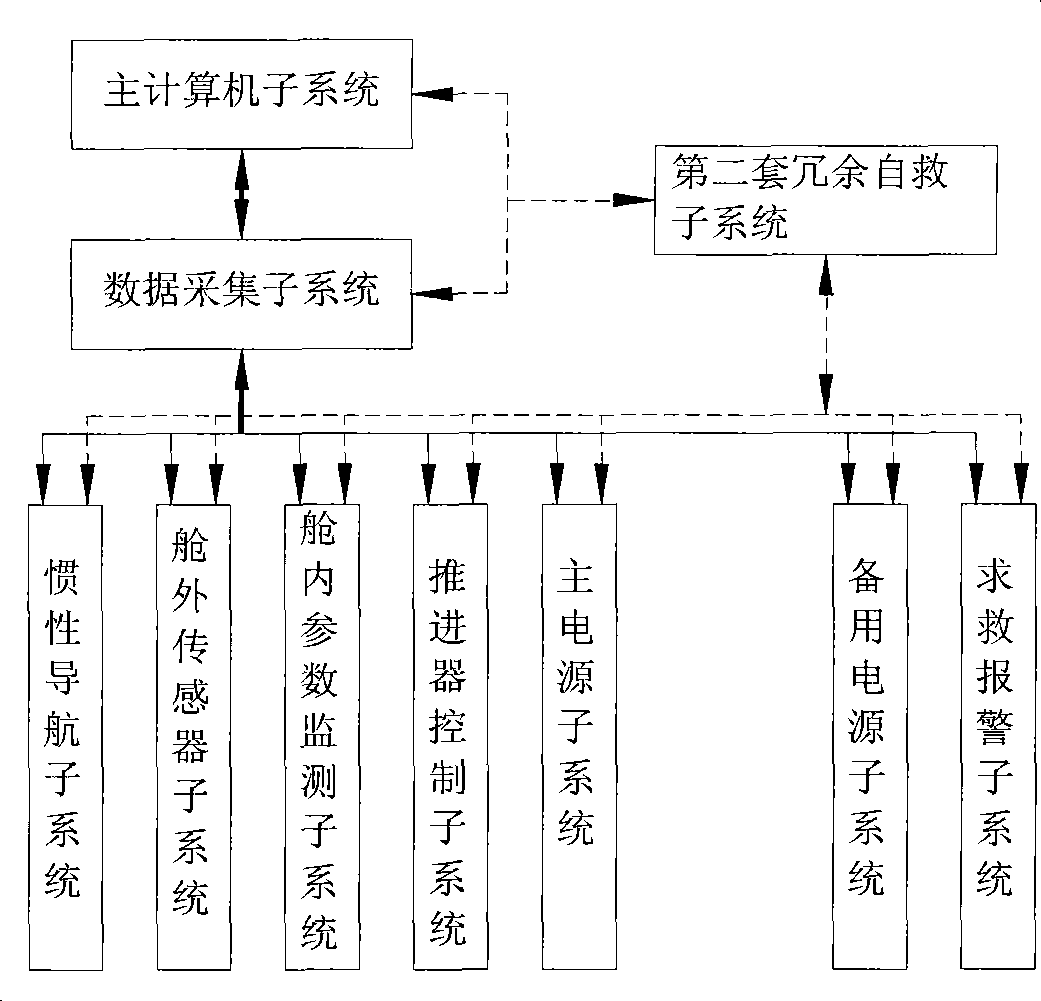
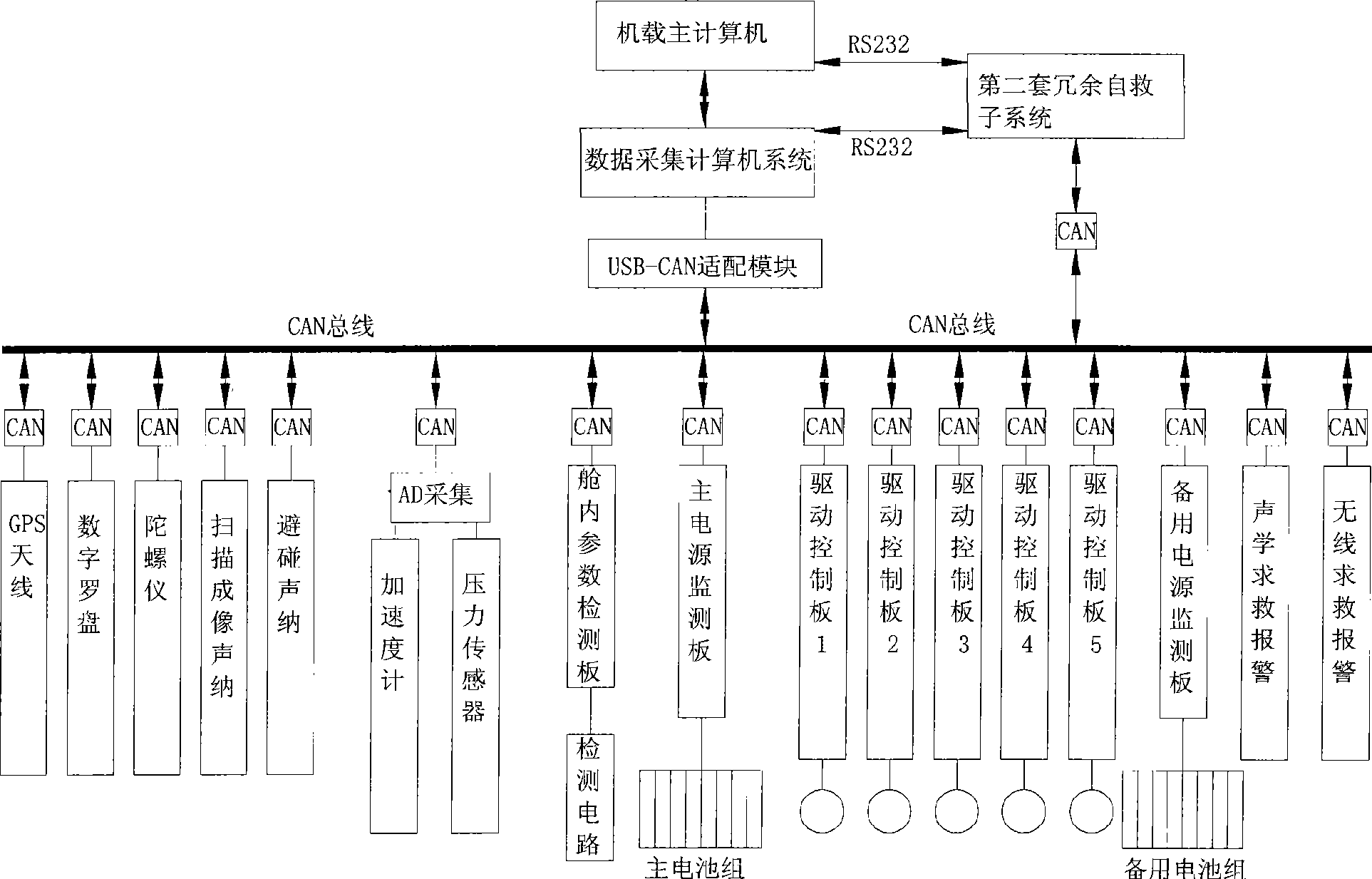
[0028] like figure 2 As shown, the autonomous underwater robot sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More