

Paralleling gauss particle filtering method based on quasi-Monte Carlo sampling
A Gaussian particle filter and quasi-Monte Carlo technology, applied in the field of signal processing, can solve problems such as difficult parallel implementation, degradation of estimation performance, particle degradation, etc., to achieve the effect of ensuring statistical relationship, improving accuracy, and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Implement the filtering method proposed by the present invention by setting up a nonlinear system dynamic model, and the specific model is as follows:
[0030] Equation of state: X t =f(X t-1 )+w t (1)
[0031] Observation equation: Z t =h(X t )+e t (2)
[0032] Among them, f(·), h(·) are bounded nonlinear functions, X t is the state of the system at time t, Z t is the observed value of the system at time t; w t is the process noise, e t is the observation noise.
[0033] The parameters involved in the filtering method of the present invention include:
[0034] N: the number of samples, P=2 k : is the number of parallel units, p=1, 2, . . . , P: is the serial number of the parallel units.
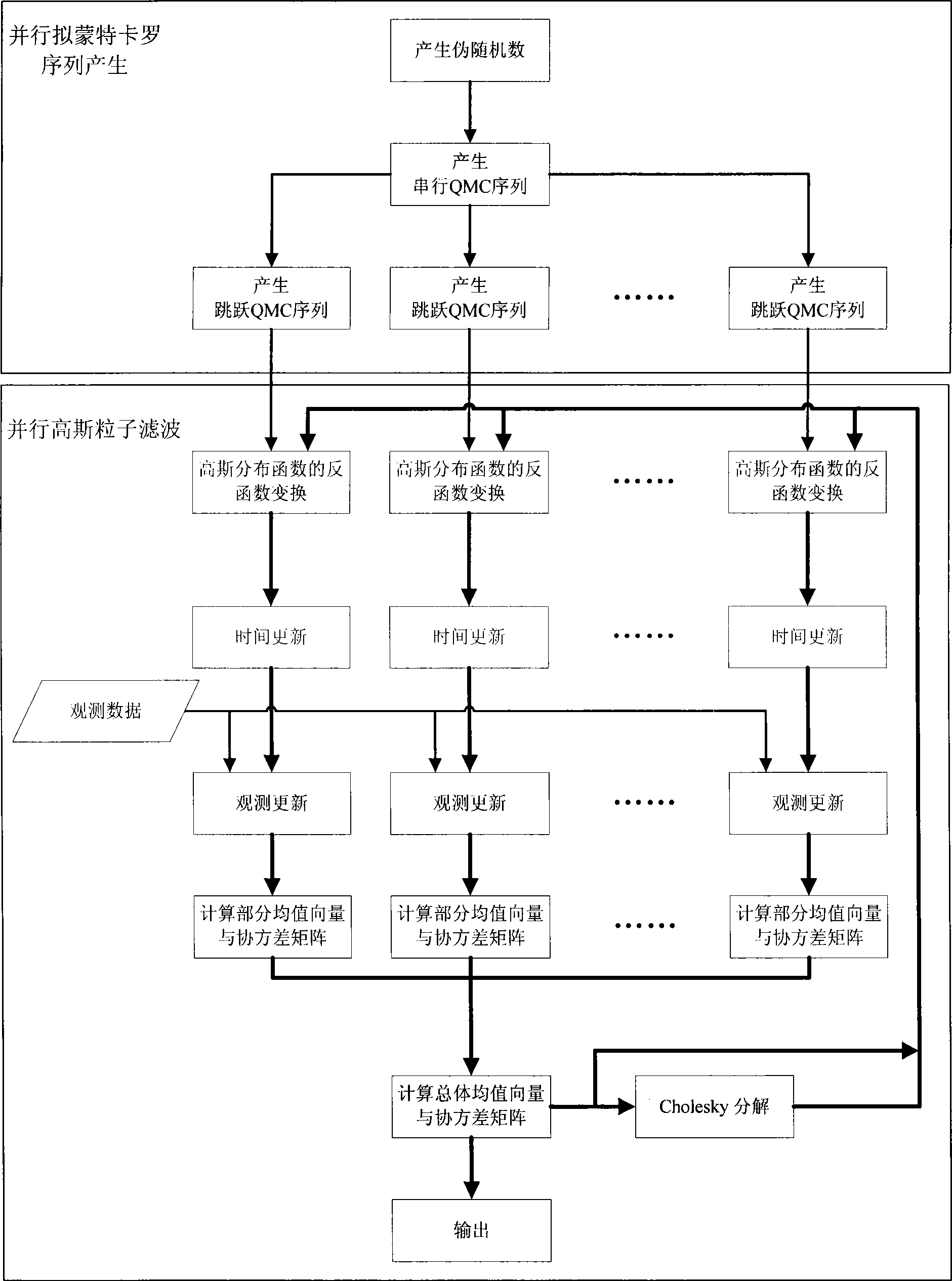
[0035] refer to figure 1 , the method of the invention includes a parallel quasi-Monte Carlo sequence generation step and a parallel Gaussian particle filter step.
[0036] 1. Parallel pseudo-Monte Carlo sequence generation steps
[0037] Using the jumping qua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More