

Gripper mechanism with fault release function for walking of patrolling robot
A technology of a line patrol robot and a clamping mechanism, applied in the field of mobile robots, can solve the problems of high energy consumption, complex structure, poor safety protection, etc., and achieve the effect of good safety protection, wide application range and easy offline.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings.
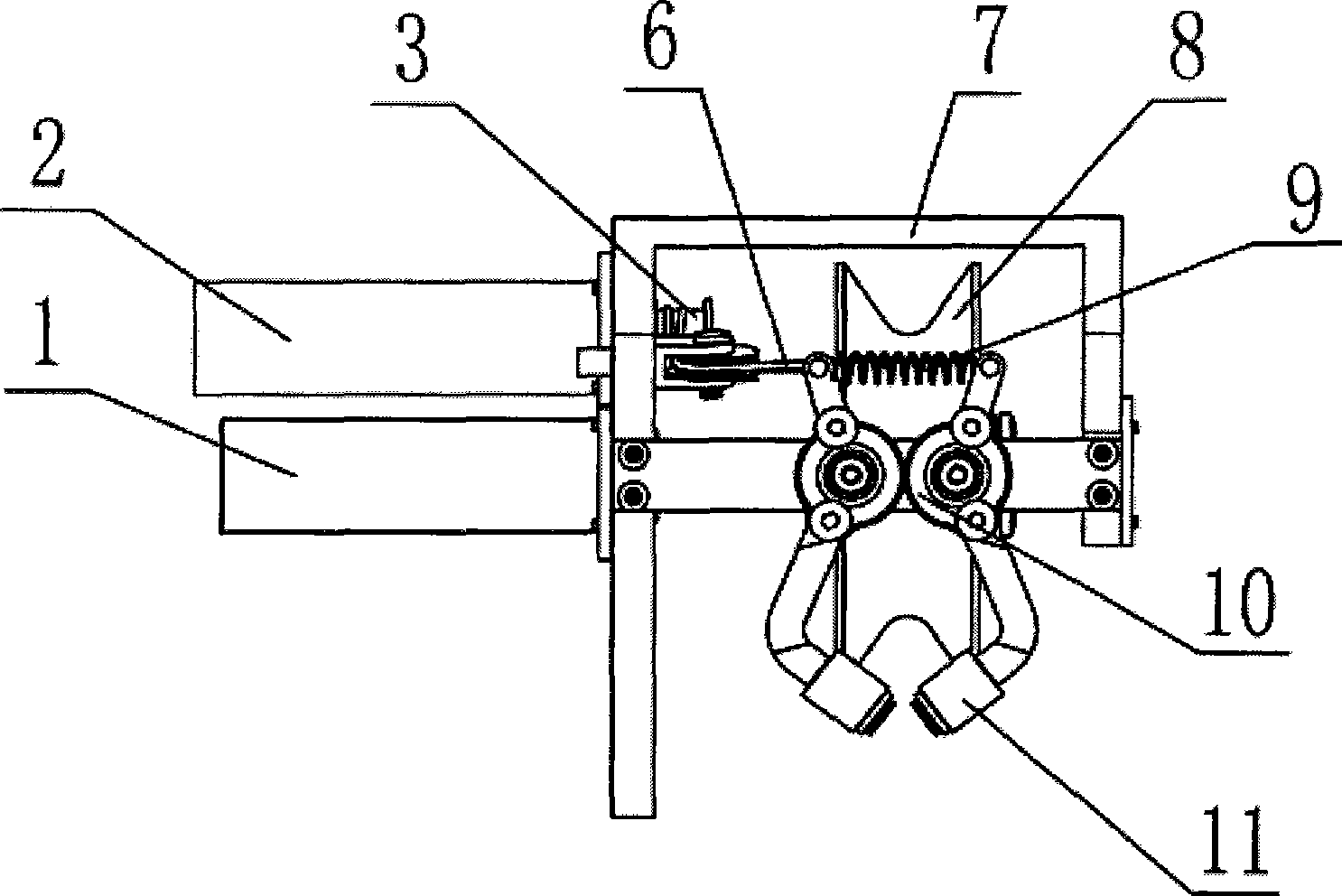
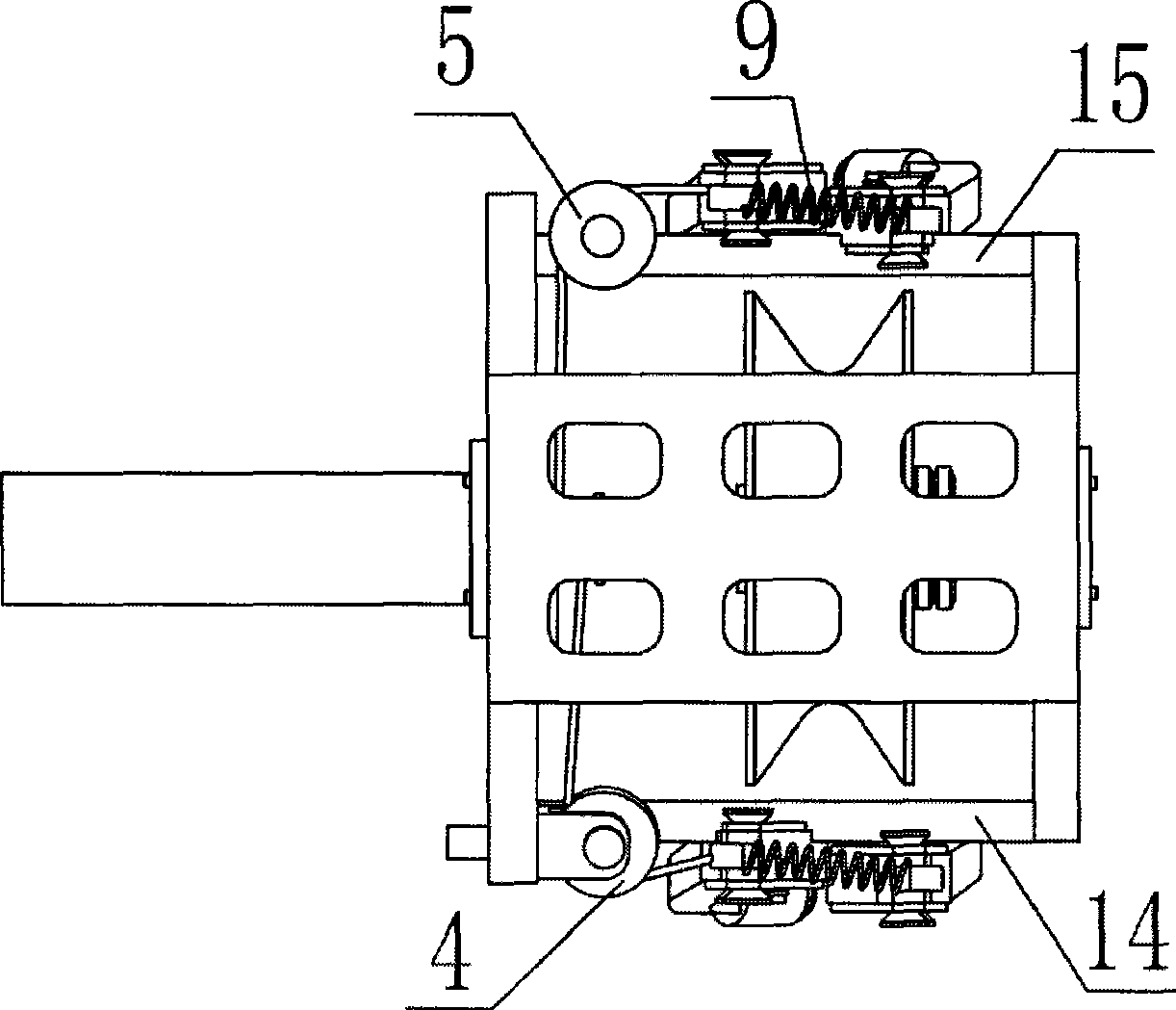
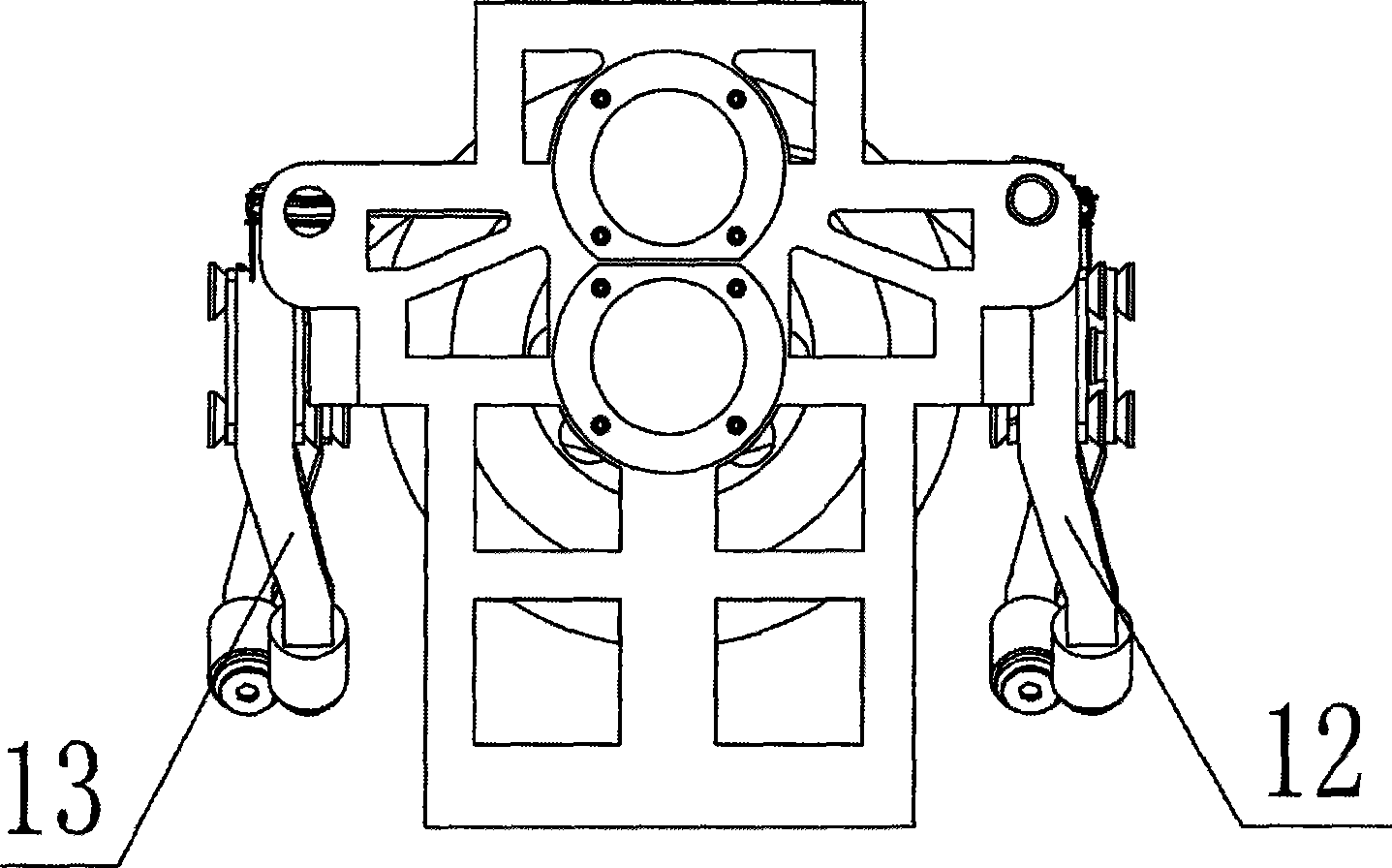
[0024] Such as Figure 1~3 As shown, the line inspection robot walking and clamping mechanism with fault release function of the present invention is used to drive the line inspection robot to perform line inspection operations on the overhead transmission line, which includes a traveling mechanism and a clamping mechanism installed on the support, wherein The holding mechanism has a clamping motor 2, which is installed on the outside of the support 7, and the output shaft is equipped with a reel 3, which is located inside the support 7; the winding on the reel 3 is connected to the front clip after being turned by the front pulley 4 and the rear pulley 5 respectively. 12 and the end of a jaw of the rear clip 13; the front clip 12 and the rear clip 13 have the same structure, and are installed on the front bracket 14 and the rear bracket 15 of the support 7 b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More