

Jumping robot and motion optimization method adopting inertia matching
An optimization method, robot technology, applied in the direction of motor vehicles, automatic toys, transportation and packaging, etc., can solve the problems of poor adaptability to non-structural environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings.
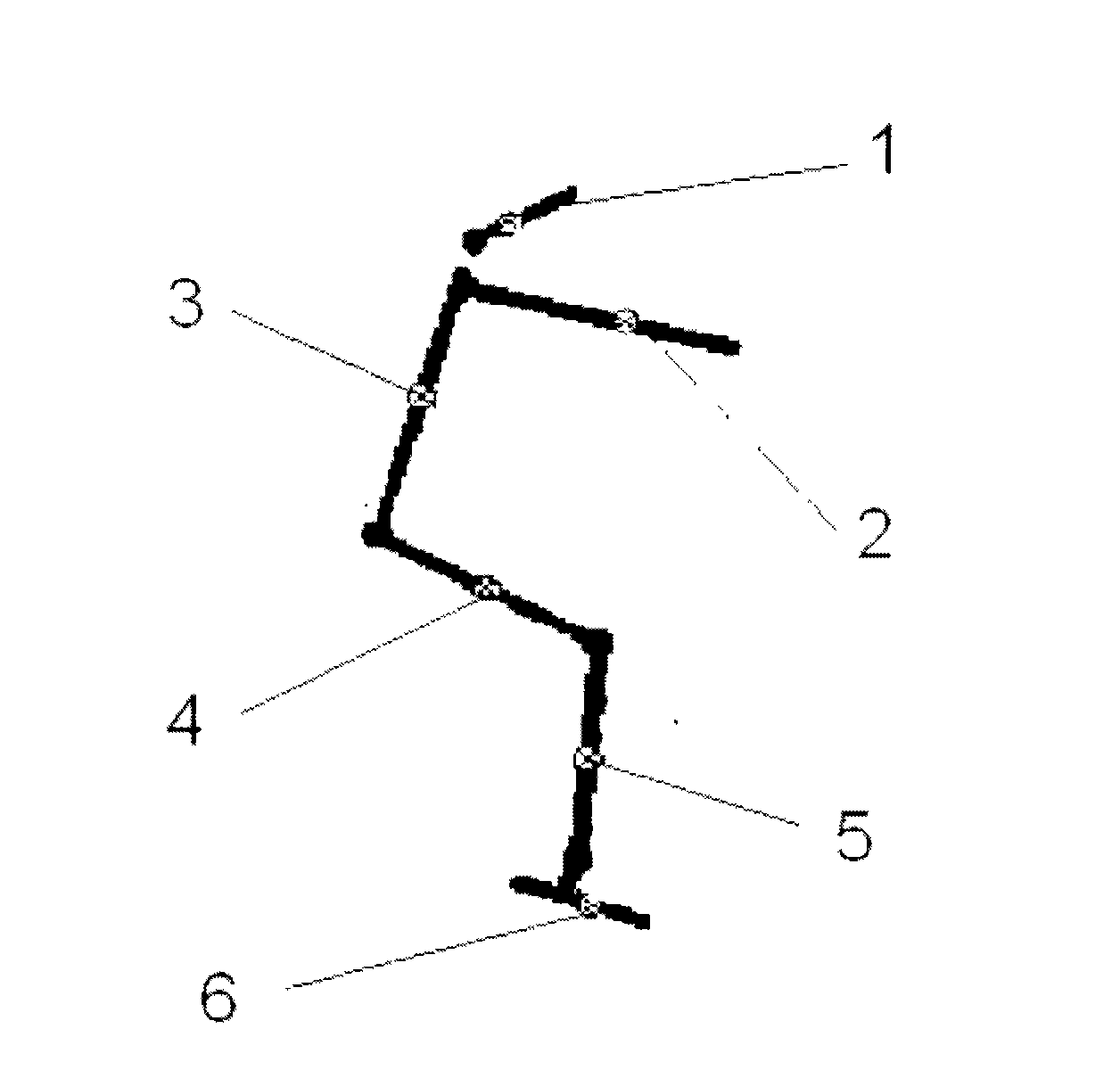
[0025] The overall structure and principle diagram of the robot are as follows: figure 1 shown.
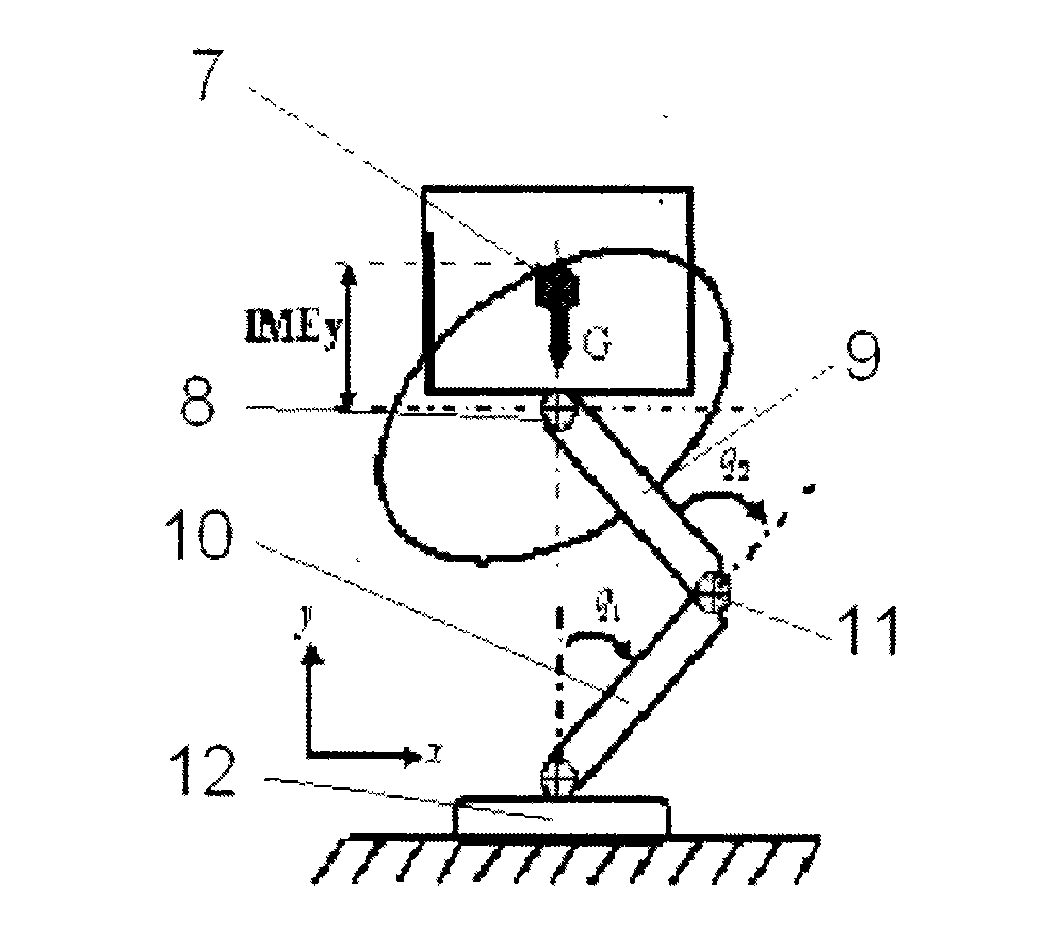
[0026] This jumping robot takes the matrix operation controller as the hardware core, and the multi-rigid body joint configuration of the robot is described as follows figure 1 The inertia matching of the jumping robot is shown, the jumping robot is regarded as a redundant mechanical arm holding the terminal load, and the force analysis of the terminal load is carried out, where: the robot load acceleration matrix is the robot gravity matrix, m l for load matching. The robot load matching index is M load , which reflects the mass distribution of the robot and the ability to carry loads. If the end load is unknown, when the robot is subjected to an external force (moment), the pseudo-inverse matrix of the Jacobian matrix of the robot is derived according to the dynam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More