

Method for correcting deviation of depth measuring sonar system
A system deviation, sounding sonar technology, applied in the field of sounding sonar, can solve the problems of multi-channel inconsistency, incident angle system deviation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
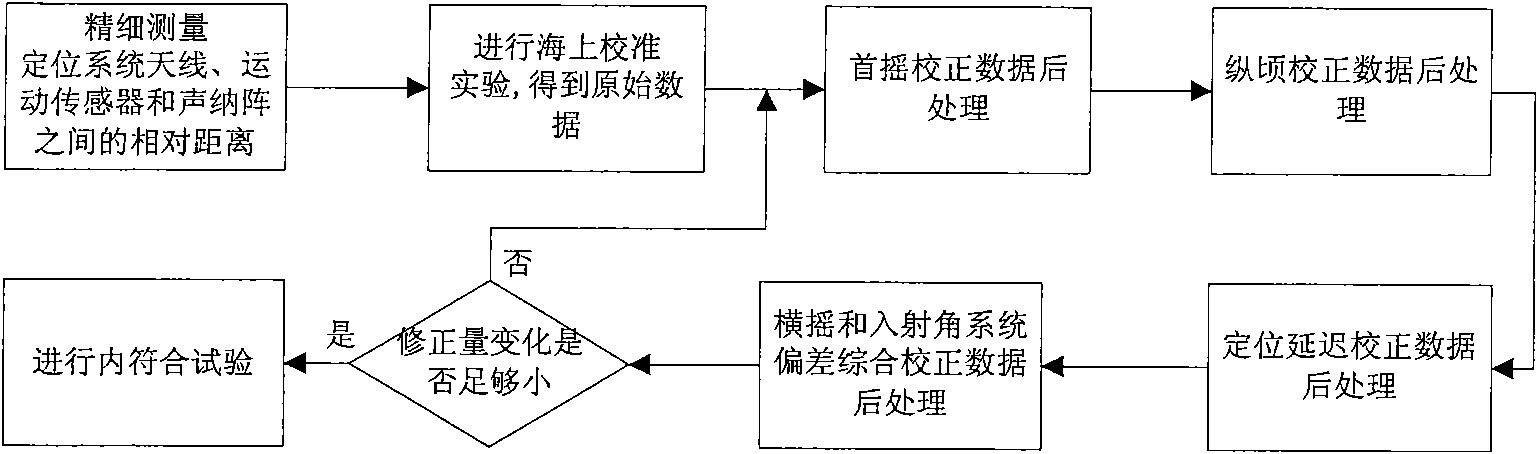
[0053] After the high-resolution bathymetric side-scan sonar obtains the incident angle and time delay, it also needs to use various sensors to obtain carrier position, carrier attitude, sound velocity profile, tide level and other data, as well as sonar arrays and various sensors on the carrier. The spatial position relationship data of the obtained time delay and incident angle are corrected, and finally the latitude and longitude coordinates and steady-state depth of the measured seabed are derived. Table 1 is a list of the main parameters affecting the error of high-resolution bathymetric side-scan sonar.
[0054] Table 1
[0055] parameters
Depth of influence
Affected position
Incidence angle θ
yes
yes
Delay τ
yes
yes
Roll (R)
yes
yes
Trim (P)
yes
yes
First shake (H)
no
yes
speed of sound (c)
yes
yes
...
Embodiment 2
[0069] Steps 1 to 3 and Steps 5 and 6 of this embodiment are consistent with Embodiment 1, the difference is that in order to obtain more accurate deviation correction data, Step 4 of this embodiment takes into account the incidence caused by the inconsistency of the sonar channel Angle system deviation, which corrects both roll and incident angle deviation. The principle and implementation steps of Step 4 of this embodiment will be described in detail below.
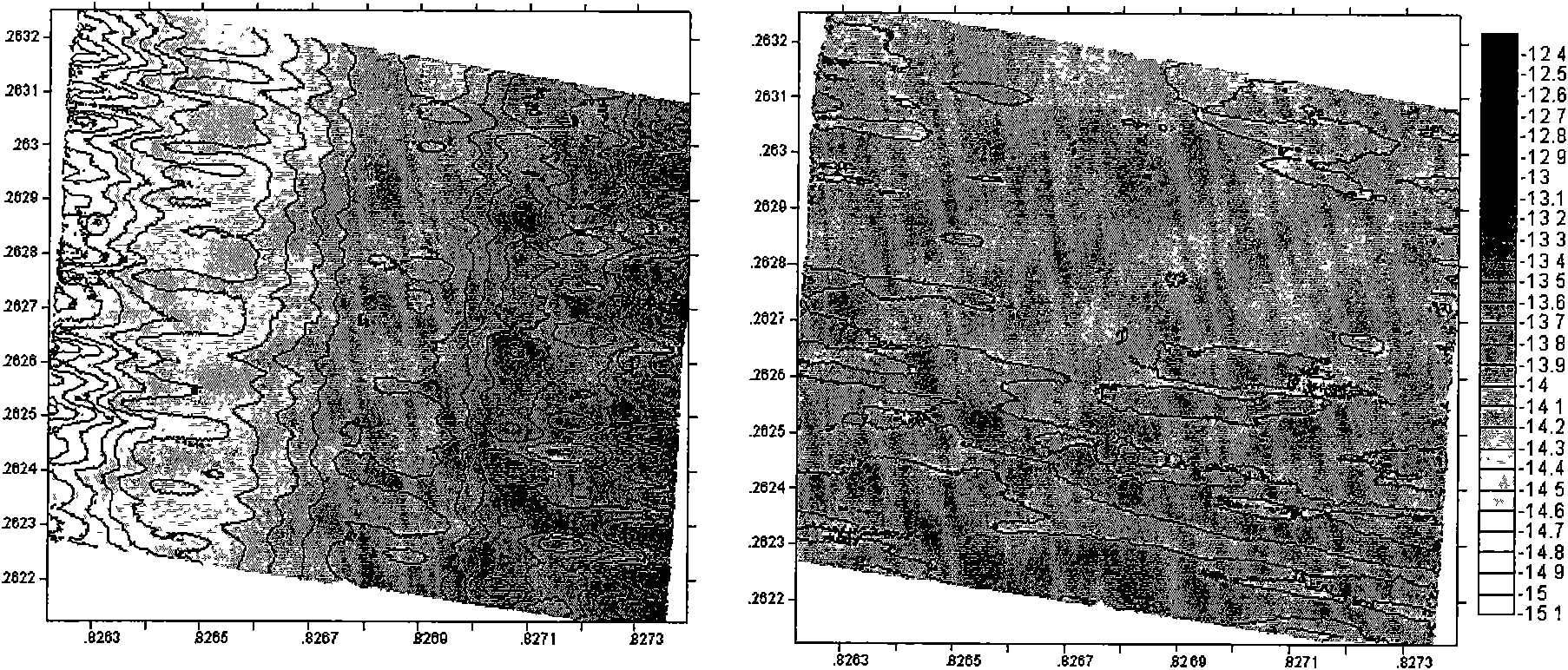
[0070] For high-resolution bathymetric side-scan sonar, due to the inconsistency between channels, the incident angle obtained after signal processing has a fixed deviation. Its size changes with the value of θ, and it will have a larger value when the value of θ is in a certain range. This deviation appears on the bathymetric chart as a ditch-like or ridge-like pseudo-terrain parallel to the track direction. Due to the existence of incident angle deviation, the calculation of the average slope in the vertical track d...
Embodiment 3
[0083] This embodiment is based on Embodiment 2, and further considers the output delay of the motion sensor, so as to perform more accurate correction of each system deviation.
[0084] In addition to installation deviations, roll, pitch and yaw angles also have deviations caused by motion sensor output delays. This deviation can be corrected by using a certain method to obtain the output delay of the motion sensor. Generally, the output delay of the motion sensor is a fixed system parameter, which is given by the motion sensor manufacturer. However, in actual work, due to the delay of data transmission or computer processing data, the actual output delay of the motion sensor does not match the value given by the manufacturer. The measurement of this value is relatively difficult. In this paper, the output delay correction of the motion sensor is performed through data post-processing. The principle is that it can be proved geometrically that the slope of a certain frame is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More