

Micro five-dimensional force sensor with overload protection and method for acquiring force vector information
An overload protection and sensor technology, applied in the field of intelligent robots, can solve the problems of ignoring the force vector action point information, building on the information of three-dimensional force and three-dimensional torque, and only focusing on the information of three-dimensional force and three-dimensional torque of intelligent robots, etc., to achieve The effect of preventing permanent damage, simple structure and easy calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
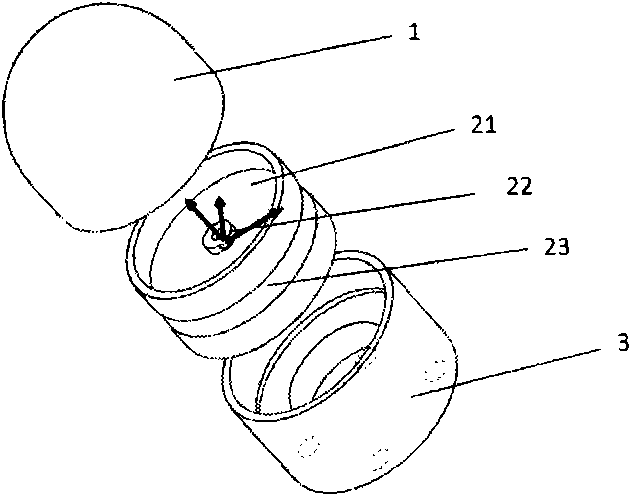
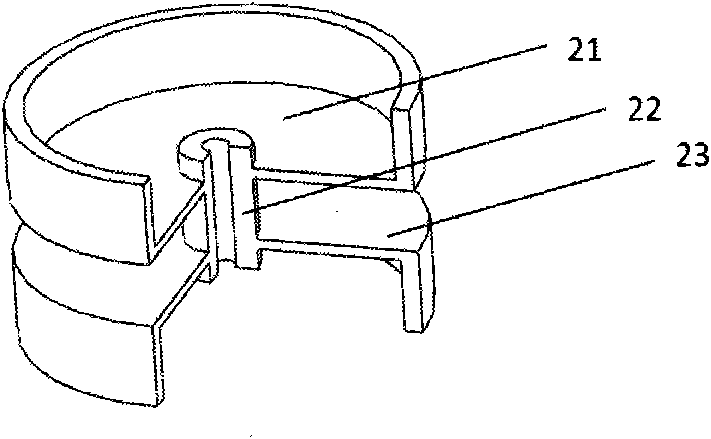
[0032] Example 1: see Figure 1-8 , The five-dimensional force sensor in the present invention first pastes five sets of full-bridge detection circuits composed of 20 strain gauges on the upper E-type film and the lower E-type film of the elastomer, and each four pieces are a set, of which the upper E-type Paste two groups on the upward side of the membrane to detect Mx and My, and paste three groups on the downward side of the E-shaped membrane to detect Fx, Fy and Fz. The five groups of detection circuits and the hardware circuit board placed in the cavity of the base The power input and output of the hardware circuit board are led out through the wire hole in the middle of the base to connect with the external circuit processing board. Screw the upper E-type membrane with the fingertips and connect the lower E-type membrane with the base to complete the assembly of the sensor. It is connected and fixed with specific applications through the four threaded holes on the base. When ...
Embodiment 2
[0033] Example 2: Taking the curved surface of the fingertip as an example, according to the detected five-dimensional force information: Fx, Fy, Fz, Mx and My and the spherical equation of the fingertip, the point of action of the force can be obtained, that is, the fingertip sensor and the The point of contact with the outside world. The origin of the sensor's coordinates is at the center of the hemisphere. The external force F acts on a certain point on the sensor. The coordinate position of this point is (x, y, z). The external force F can be decomposed into three axial components Fx, Fy and Fz acting at the point of application. The external force F can also be equivalent to three forces Fx, Fy, Fz acting on the coordinate origin and three moments Mx, My, Mz around the coordinate origin. And the three forces Fx, Fy, Fz and the three moments Mx, My, Mz have the following relationship with the external force F:
[0034] F ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| size | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More