

Inner wall spraying robot system and inner wall spraying method
A spraying robot and robot technology, applied in the field of robotics, can solve the problems of bumping of the sprayed object, narrow inner wall space, poor flexibility, etc., and achieve the effects of preventing interference, accurate positioning, and convenient movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] The specific embodiments of the present invention will be described in further detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
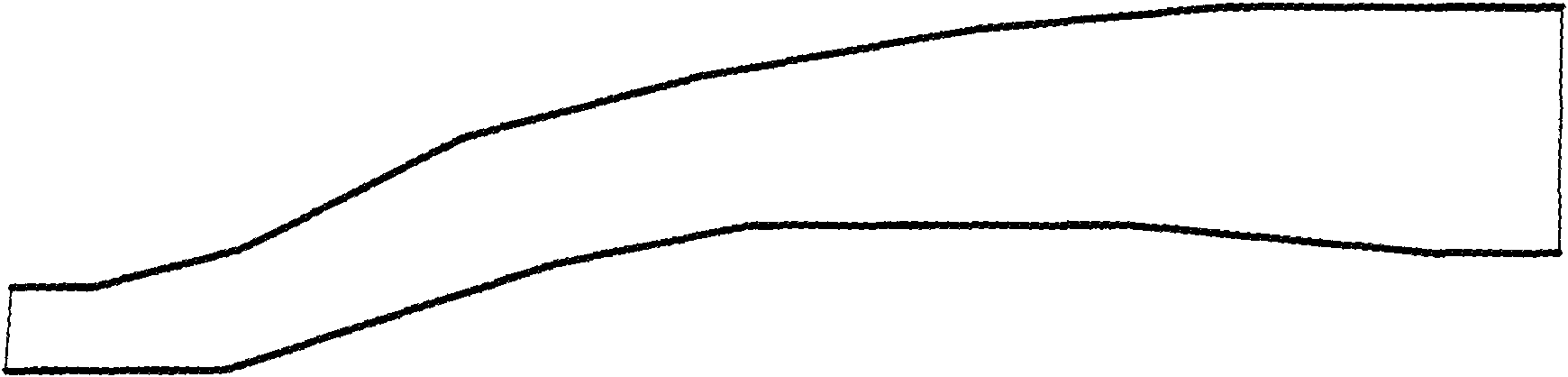
[0030] figure 1 It is a schematic diagram of a special-shaped long and narrow pipe for spraying by a robot according to an embodiment of the present invention. Such as figure 1 As shown, it is a typical variable cross-section S-shaped narrow and long pipeline, and its inner wall spraying operation is difficult to complete with existing robots.
[0031] figure 2 Is a perspective view of the system of the embodiment of the present invention; Figure 3a , 3b They are a top view and a side view of the system of the embodiment of the present invention; Figure 4 Is a perspective view of the base and pneumatic transport vehicle assembly in the system of the embodiment of the present invention; Figure 5 It is a sc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More