

Federated Kalman filtering-based method for fusing multilateration data and radar data
A Kalman filter, multi-point positioning technology, applied in the direction of radio wave reflection/re-radiation, radio wave measurement system, use of re-radiation, etc., can solve the problem that the accuracy of the system output results cannot be guaranteed, the detection accuracy of the sensor is reduced, and the detection accuracy is reduced. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
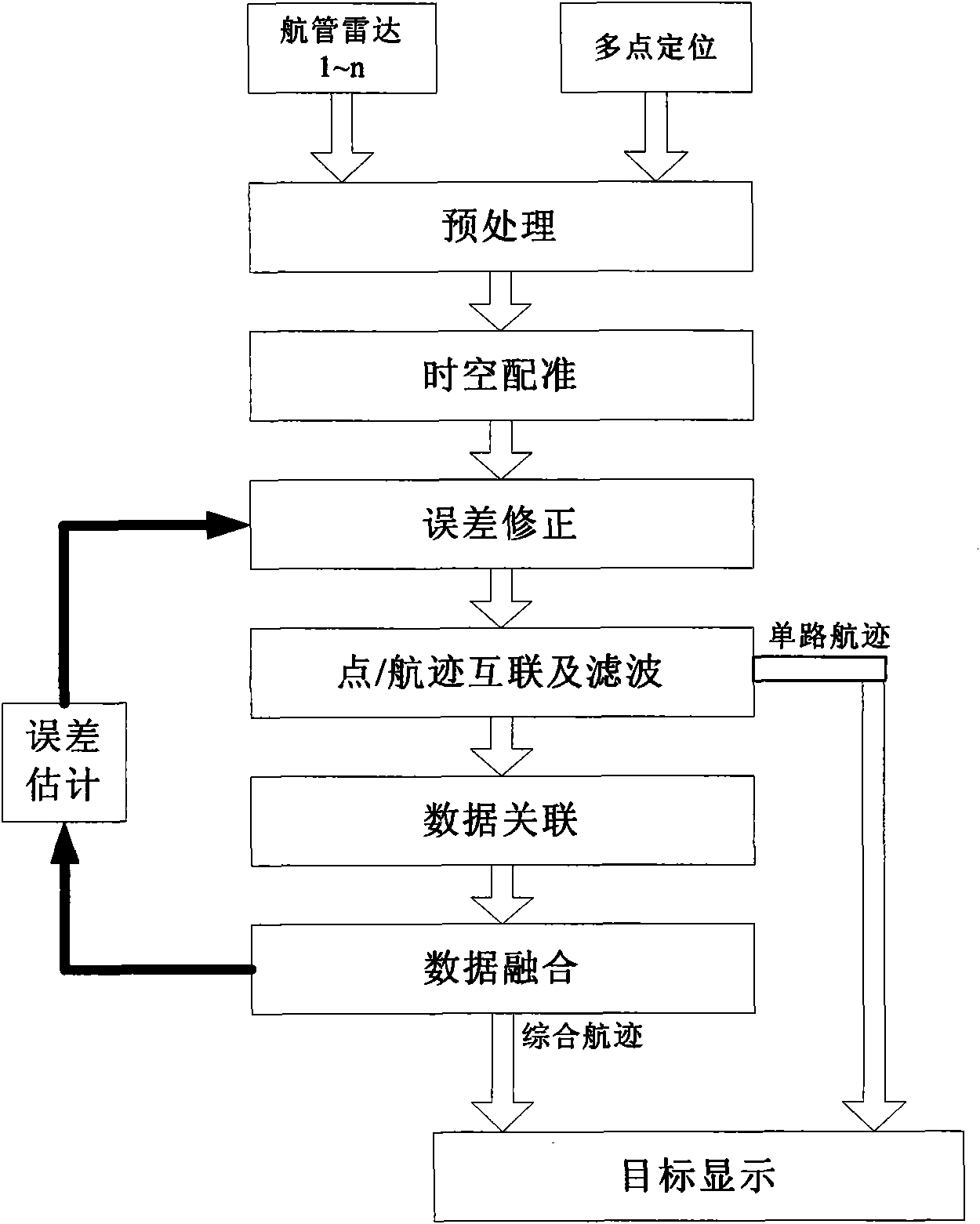
[0067] Such as figure 1 As shown, the multipoint positioning data and radar data fusion method based on the joint Kalman filter of the present invention includes seven processes: preprocessing, space-time registration, error correction, single sensor point track or track interconnection and filtering, data association , data fusion and error estimation.
[0068] Since the principle of single-sensor point track or track interconnection is similar to that of multi-sensor data association, they are collectively referred to as data interconnection, which is described in the data interconnection section. Track filtering is logically closely related to data fusion, so it is also described in the same part.
[0069] (1) Preprocessing steps
[0070] After the system receives the target measurement information sent by each sensor, it first needs to decode and analyze according to the data format defined by each sensor, eliminate possible error information, and convert the target meas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More