

Mechanical arm joint module with two degrees of freedom
A technology of joint modules and mechanical arms, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of non-concentricity, difficult control, complicated connection, etc., and achieve the effect of easy processing, convenient disassembly and installation, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
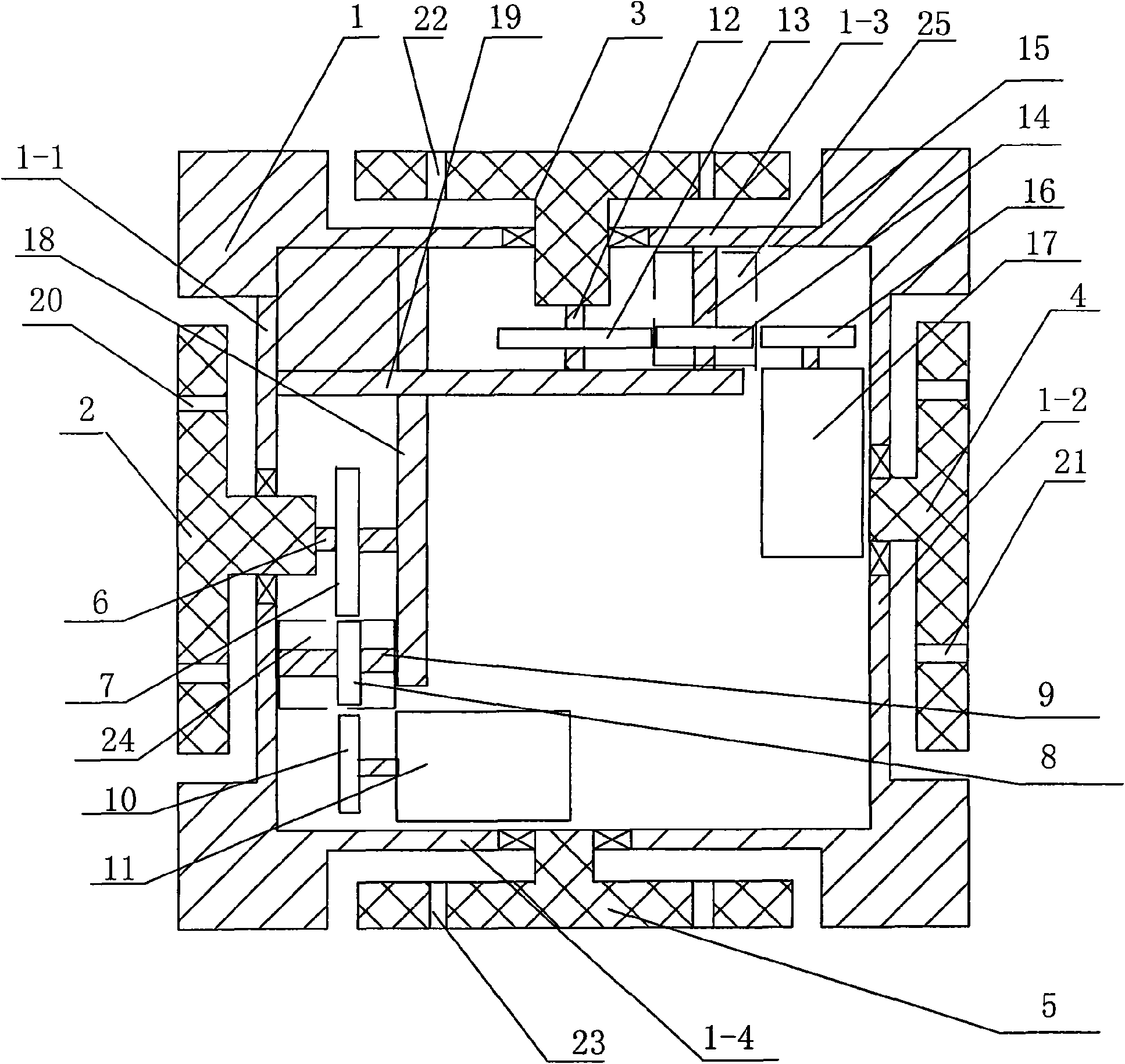
[0007] Specific implementation mode one: combine figure 1 Describe this embodiment, the manipulator joint module of this embodiment consists of a cubic box 1, a first output turntable 2, a second output turntable 3, a first follow-up turntable 4, a second follow-up turntable 5, and a first output turntable 6 , the first gear 7, the first reduction mechanism 24, the second gear 10, the first motor 11, the second output shaft 12, the third gear 13, the second reduction mechanism 25, the fourth gear 16, the second motor 17, the second A fixed frame 18 and a second fixed frame 19 are formed, and the left side wall, right side wall, upper end surface, and lower end surface of the cubic box 1 are respectively defined as the first side wall 1-1 and the second side wall 1-2. , the first end face 1-3 and the second end face 1-4, the first fixed frame 18 and the second fixed frame 19 are arranged in the described cubic box body 1, and the first fixed frame 18 and the first side wall 1- ...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination figure 1 Describe this embodiment, the first reduction mechanism 24 of this embodiment is composed of a first differential gear set 8 and a plurality of first differential gear shafts 9, the gears in the first differential gear set 8 are sleeved on On the corresponding first differential gear shaft 9, the number of gears and the transmission ratio of the first differential gear set 8 are selected according to the single-axis torque and speed parameters of the mechanical arm, and this connection structure corresponds to the parameters of the mechanical arm , The overall disassembly and assembly are convenient and easy to maintain. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0009] Specific implementation mode three: combination figure 1 Describe this embodiment, the second reduction mechanism 25 of this embodiment is composed of the second differential gear set 14 and a plurality of second differential gear shafts 15, the gears in the second differential gear set 14 are sleeved on On the corresponding second differential gear shaft 15, the number of gears and the transmission ratio of the second differential gear set 14 are selected according to the single-axis torque and speed parameters of the mechanical arm, and this connection structure corresponds to the parameters of the mechanical arm , The overall disassembly and assembly are convenient and easy to maintain. Other components and connections are the same as those in the first embodiment.
[0010] Working principle: Fix the mechanical arm to the cubic box 1 through the first through hole 20, the second through hole 21, the third through hole 22 and the fourth through hole 23, respectively,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More