

Precise resetting system of humanoid robot initial position
A humanoid robot and initial position technology, applied in the direction of total factory control, total factory control, electrical program control, etc., can solve the problems of troublesome reset work, lack of versatility, looseness, etc., and achieve fast and universal reset process , the effect of easy installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The following examples are not intended to limit the present invention.
[0029] Whole invention realization process is as follows:
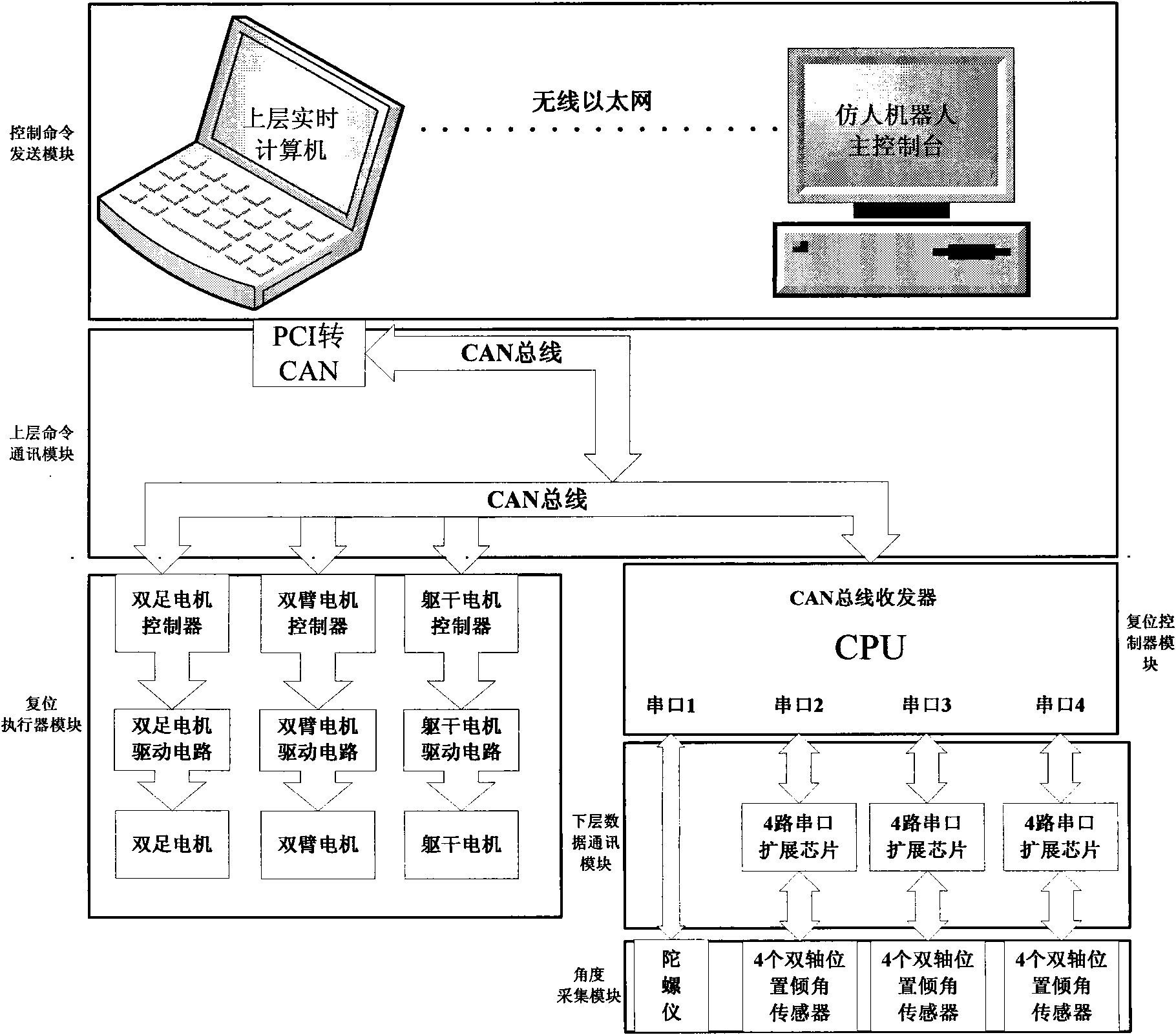
[0030]The structure of the accurate reset system for the initial position of the humanoid robot of the present invention is as follows: figure 1 As shown, it includes a control command sending module, an upper command communication module, a reset controller module, a reset actuator module, a lower data communication module and an angle acquisition module. Among them, the control command sending module includes the humanoid robot main console and the upper real-time computer, the upper layer command communication module includes a bus adapter card and CAN bus, and the reset controller module includes a CPU, a CAN bus transceiver and a serial communication port. The controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More