

Wheel-pendulum compound driving device for small mobile robot
A mobile robot and driving device technology, applied in the field of robotics and automation, can solve the problems of increasing the complexity and cost of the mechanism, complicated mechanism and control, and large frictional resistance, saving turning space, simple and reliable control, and obstacle-surmounting ability. strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
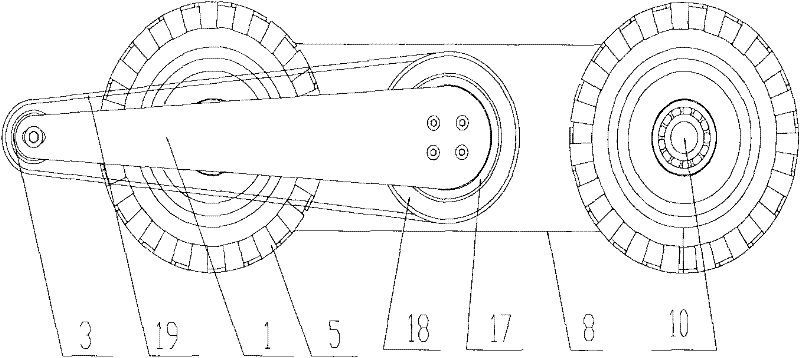
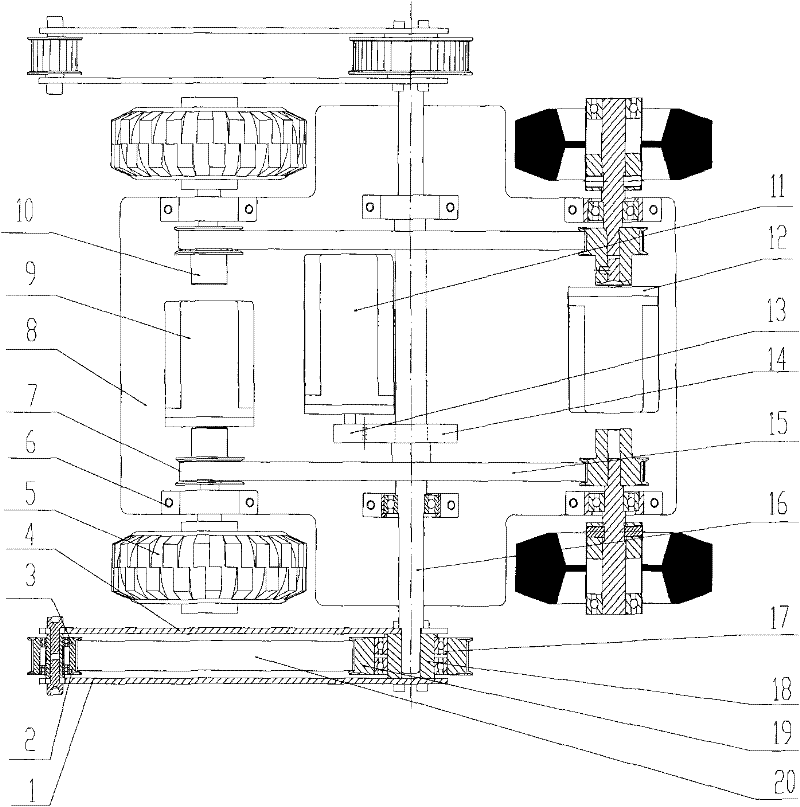
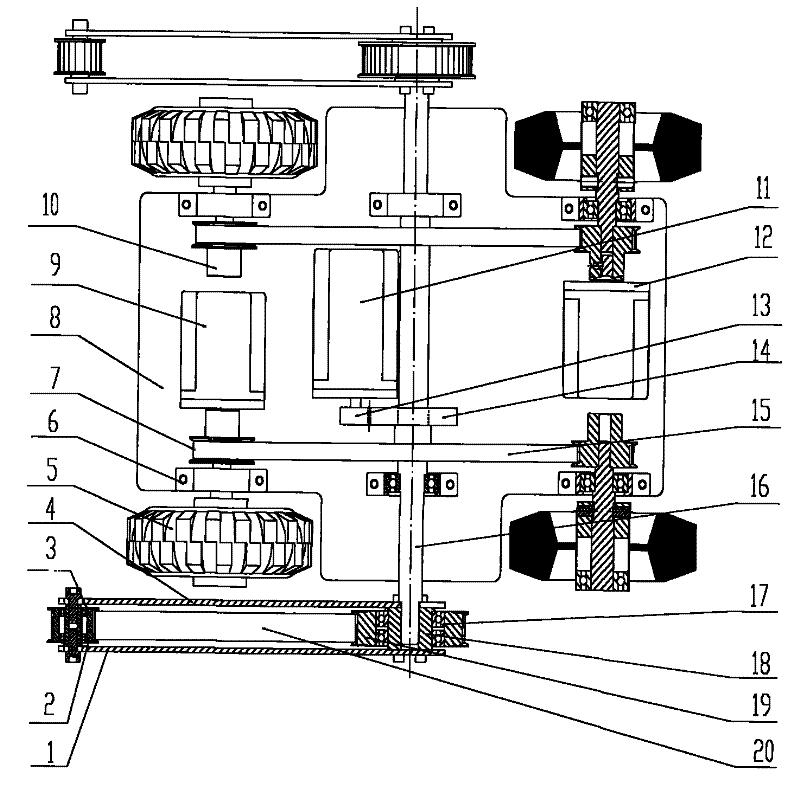
[0013] The present invention includes two outer connecting plates, two inner connecting plates, four small swing arm bearings, four large swing arm bearings, two small pulleys, two large pulleys, four wheels, six bearing seats, Four drive pulleys, base plate, two drive motors, four drive shafts, swing arm motor, three motor mounts, pinion gear, bull gear, main shaft, two bushings, two timing belts and two swing arm belts ; Two drive motors are diagonally fixed at both ends of the base plate through two motor seats, the output shaft of the drive motor is connected with one end of the drive pulley through a set screw, and the other end of the drive pulley is connected with one end of the drive shaft through a tightening Screw connection, the other end of the drive shaft is connected with the pulley, the middle of the drive shaft is fixed on the bottom plate through the bearing seat, and the drive pulley is connected with the drive pulley on the same side through the timing belt, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More