

Series-parallel robot combined processing system and control method thereof
A technology of combined processing and control methods, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor flexibility and adaptability, low production efficiency, and small work space, so as to enhance adaptability and flexibility, The effect of improving the degree of automation and improving the reliability of fault tolerance
Inactive Publication Date: 2010-08-25
BEIHANG UNIV
View PDF0 Cites 50 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The main disadvantages of this type of system are: simple structure, which can only realize a single movement form; small working space, limited load capacity; series manipulators have joint cumulative error, which reduces the repeated positioning accuracy of the end effector; flexibility and adaptability Poor performance, usually does not have redundant fault tolerance function; most of the work load is concentrated on the series manipulator, the task distribution of equipment is not balanced, affecting the overall life of the system; only the series manipulator moves to complete the main task, resulting in low production efficiency
Most of the software control methods of the system are simple offline teaching and programming methods, which can only provide limited and single motion instructions for the robot, which limits the working mode and flexibility of the robot; all motion instructions must be set offline, Once the robot starts working, it can no longer change the instructions in real time, resulting in the robot having no ability to respond to changes in the on-site environment and emergencies
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
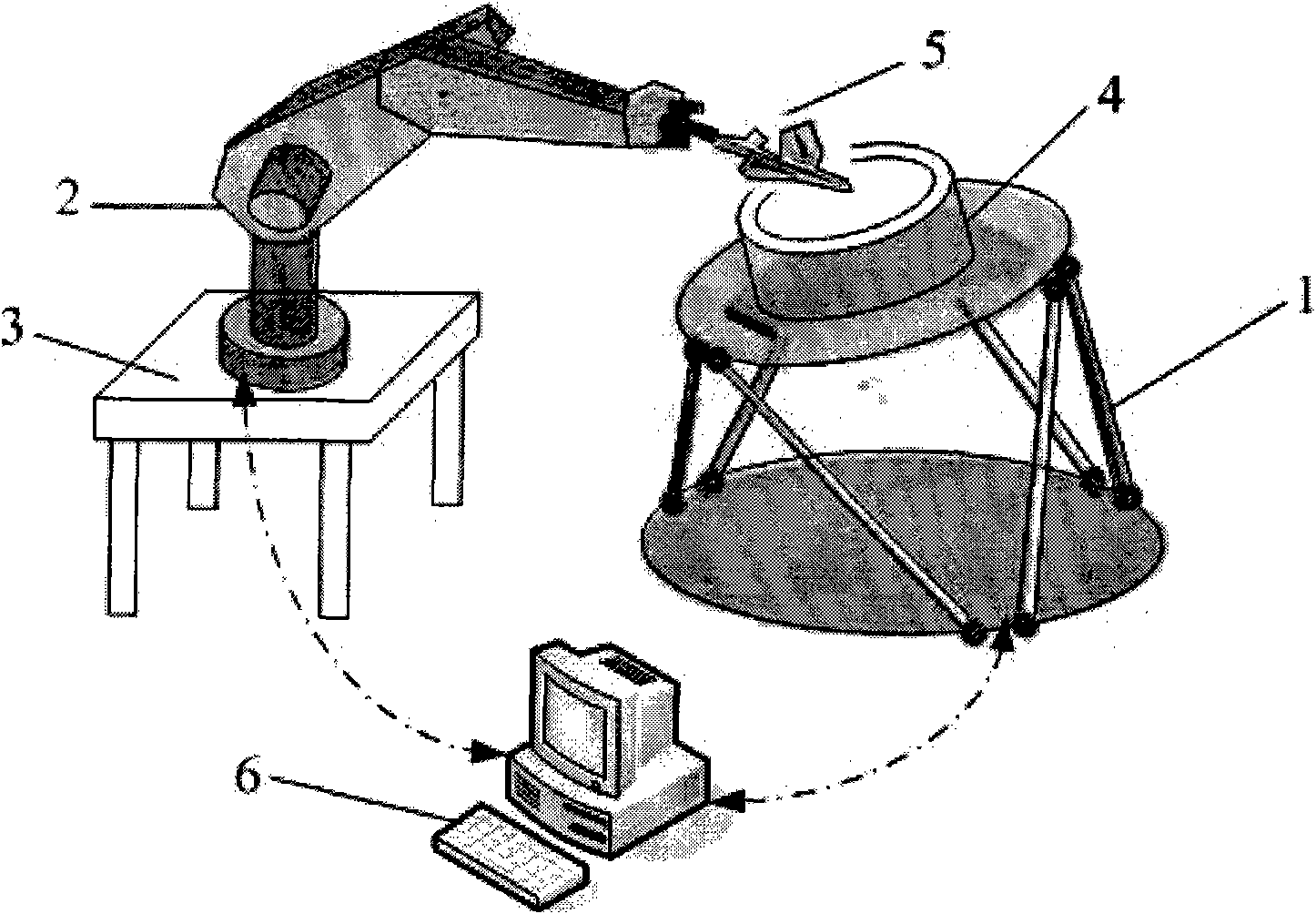
The invention discloses a series-parallel robot combined processing system and a control method thereof. The system comprises a series robot, a parallel robot, a controller, a platform, workpieces to be processed and a terminal executer. The controller controls the series robot and the parallel robot by adopting a layering control system, the upper controller is used for distributing tasks and controlling movement, and the lower series-parallel robot is used for driving hardware and executing the tasks. The invention combines the system hardware with software, thereby enhancing the automation degree, production efficiency, bearing capability and repetitive positioning accuracy of processing, strengthening the flexibility and adaptability of the system, realizing real-time control on line, and having a certain intelligent performance.
Description
technical field The invention relates to a dual-robot cooperative system for industrial processing and a software control method thereof, in particular to a series-parallel robot joint processing system and a software control method thereof. Background technique In recent years, the application of robots to industrial processing production lines has become one of the mainstream trends in domestic and foreign processing industries. The number of such robots is growing rapidly, new types are emerging, and corresponding software control methods are gradually diversifying. Robots for industrial processing are usually composed of three basic parts: main body, drive system and control system, with 3 to 6 degrees of freedom of movement. The drive system includes a power device and a transmission mechanism to make the actuator perform corresponding actions; the control system sends command signals to the drive system and the actuator and controls them according to the input program...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J9/08
Inventor罗婉琴付永领祁晓野王岩彭朝琴
OwnerBEIHANG UNIV