

Unmanned aerial vehicle (UAV) position and orientation estimation method based on cooperative target characteristic lines
A technology for cooperative target and pose estimation, which is applied in the field of image processing and can solve problems such as unmanned aerial vehicles being unable to achieve autonomous navigation and landing, and unmanned aerial vehicles being damaged.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in combination with specific embodiments.
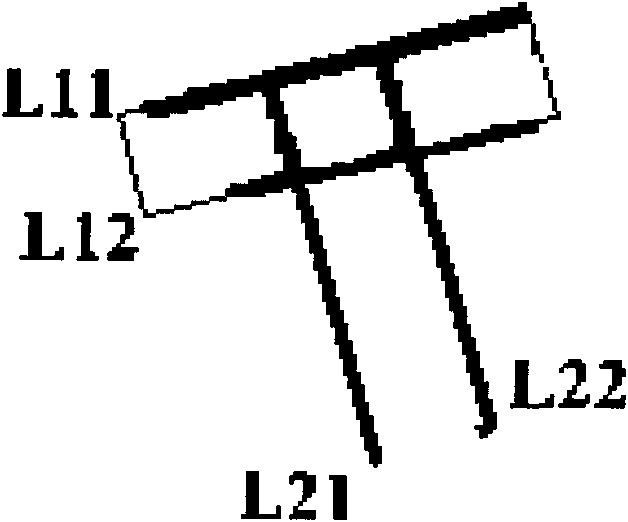
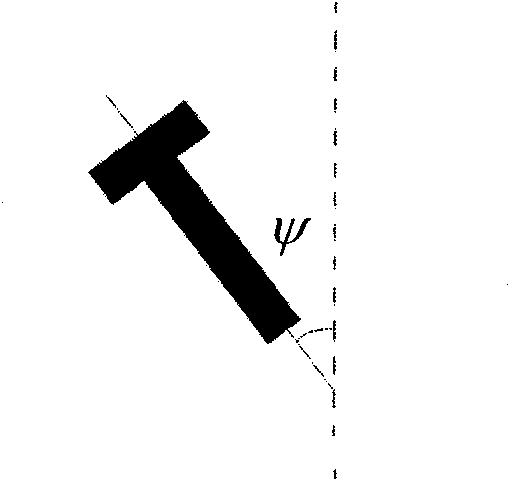
[0017] Such as figure 2 As shown, calculate the vanishing line equation of the two sets of parallel lines of the cooperative target; then, get the slope of the vanishing line, and thus calculate the roll angle; as image 3 The yaw angle of the UAV is obtained as shown; Substitute the known four point coordinates into the relationship equation between the UAV camera coordinate system and the world coordinate system to calculate the remaining four pose parameters.
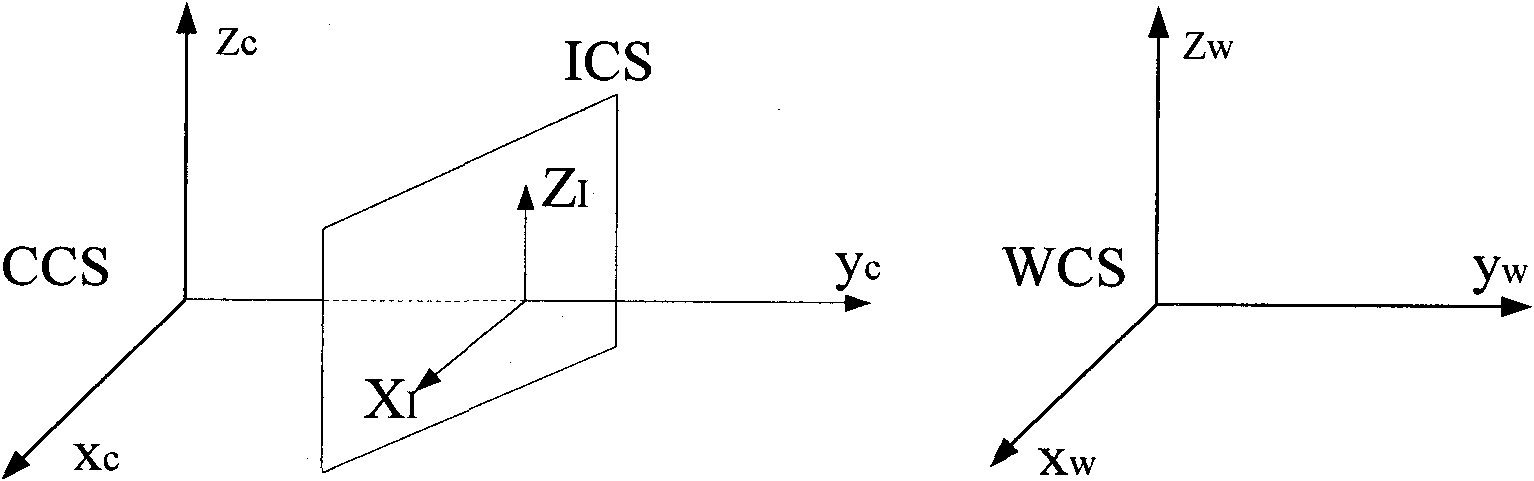
[0018] Such as figure 1 As shown, WCS is the world coordinate system, the origin is established at a point on the plane where the landing icon is located, and the xw-yw plane is parallel to the ground; CCS is the camera coordinate system, the origin is established at the optical center, the yc axis coincides with the optical axis, and the xc-zc plane Parallel to the image plane; ICS is the image coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More