

Visual navigation method in autonomous rendezvous and docking
A visual navigation, rendezvous and docking technology, applied in the field of image information, can solve problems such as the inability to use the space environment, the inability to transmit sound waves, and the real-time performance to be mentioned, to eliminate gross errors, improve stereo matching speed, and strong anti-interference ability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
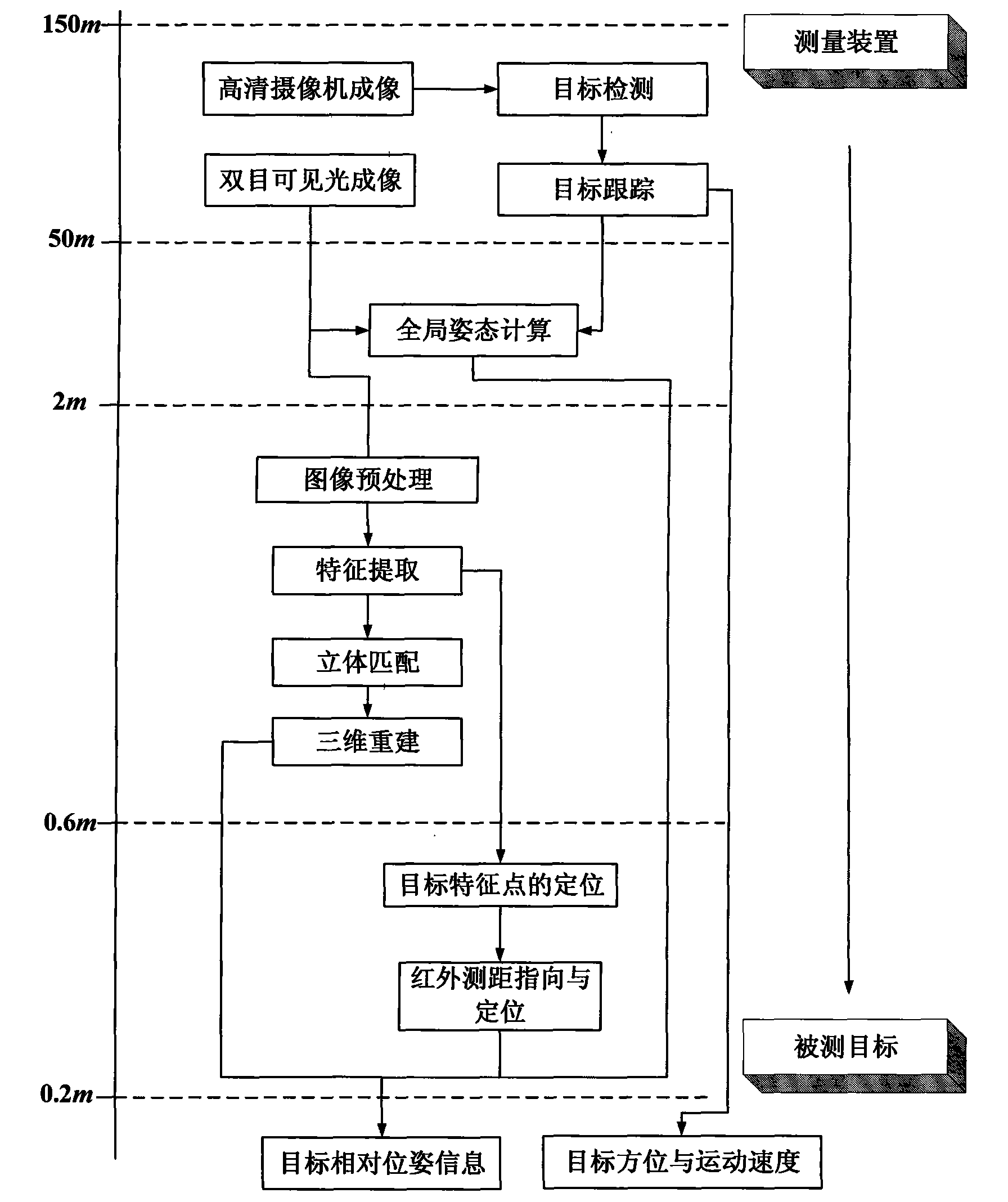
[0042] refer to figure 1 , the visual navigation steps of the present invention are as follows:
[0043] Step 1, 150m ~ 50m long-distance target detection and tracking.
[0044] (1.1) Obtain the weak target image in the space through a high-resolution camera;
[0045] (1.2) Identify and determine the target according to the characteristics of the target;
[0046] (1.3) Use the particle filter to effectively track the target. The particle filter is a nonlinear dynamic system analysis tool based on Bayesian theory, stochastic estimation theory and Monte Carlo method. It is also a tool for solving Bayesian A practical algorithm for estimation problems. The algorithm is to use a random sample set with the weight corresponding to the target to represent the posterior probability density of the target, calculate the histogram of each particle, and normalize it to the observation density p(u), 0≤p(u) ≤1. Use p(u) and the tracked area q(u) of the first frame to update the weight ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More