

Fast three-dimensional point cloud searching and matching method
A technology of 3D point cloud and matching method, applied in image data processing, instrumentation, calculation, etc., can solve the problems of registration failure, iterative local minimization, mismatching, etc., and achieve the effect of improving work efficiency and strong fault tolerance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
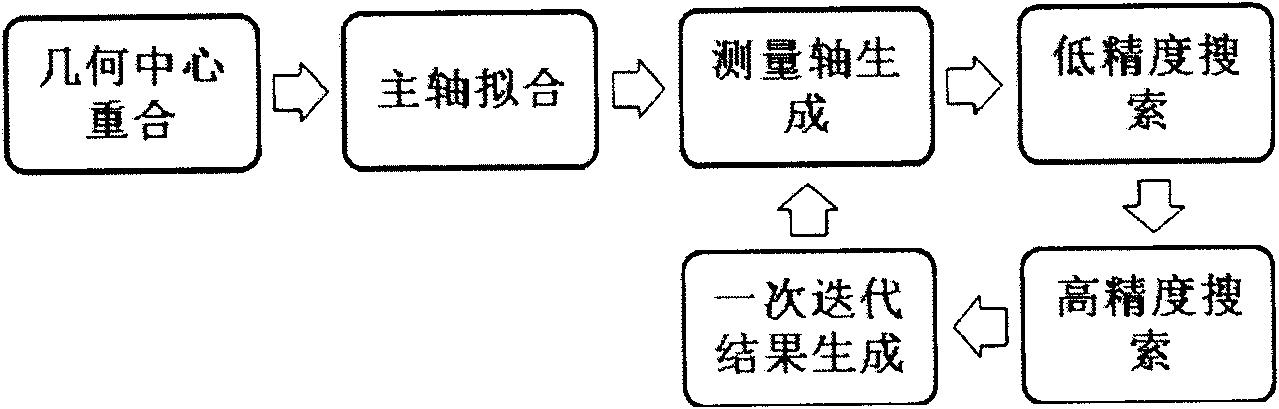
[0027] Such as figure 1 As shown, the present invention includes the following calculation steps: main axis registration, measurement axis generation, low-precision search, high-precision search and one iteration result generation. The main axis registration link is responsible for defining the direction of the point cloud and completing the initial registration; the measurement axis generation link provides the search range in the current iteration for the moving point cloud; The best registration pose; the high-precision search is responsible for obtaining a better best registration pose with a smaller step size search position error on the basis of the low-precision search; the generation of an iterative result is responsible for generating an iteration based on the measurement results at each position The final result of the iteration. Specific steps are as follows:
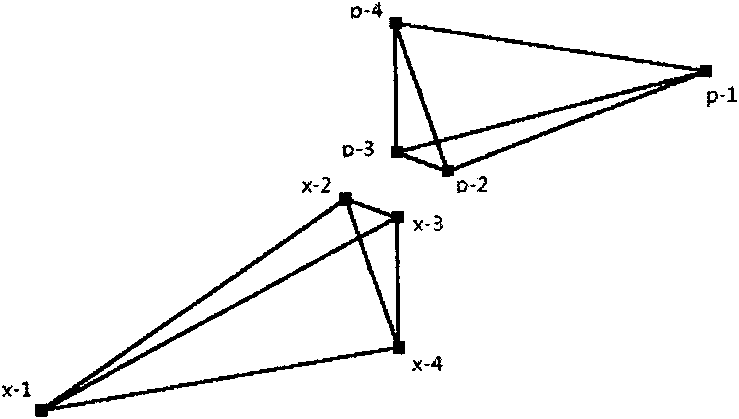
[0028] There are two point clouds P and X to be registered, such as figure 2 shown. P is the moving p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More