

Modularized multiped walking robot capable of realizing functional shift between hands and feet
A walking robot and modular technology, applied in the field of robots, can solve the problems of no clamping functional parts in the foot unit, increasing the difficulty of processing and assembly, and many parts, etc., so as to reduce the number of connecting parts, reduce the installation position accuracy, reduce the The effect of the difficulty of machining and assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] The present invention will be described in further detail below through embodiments in conjunction with the accompanying drawings.
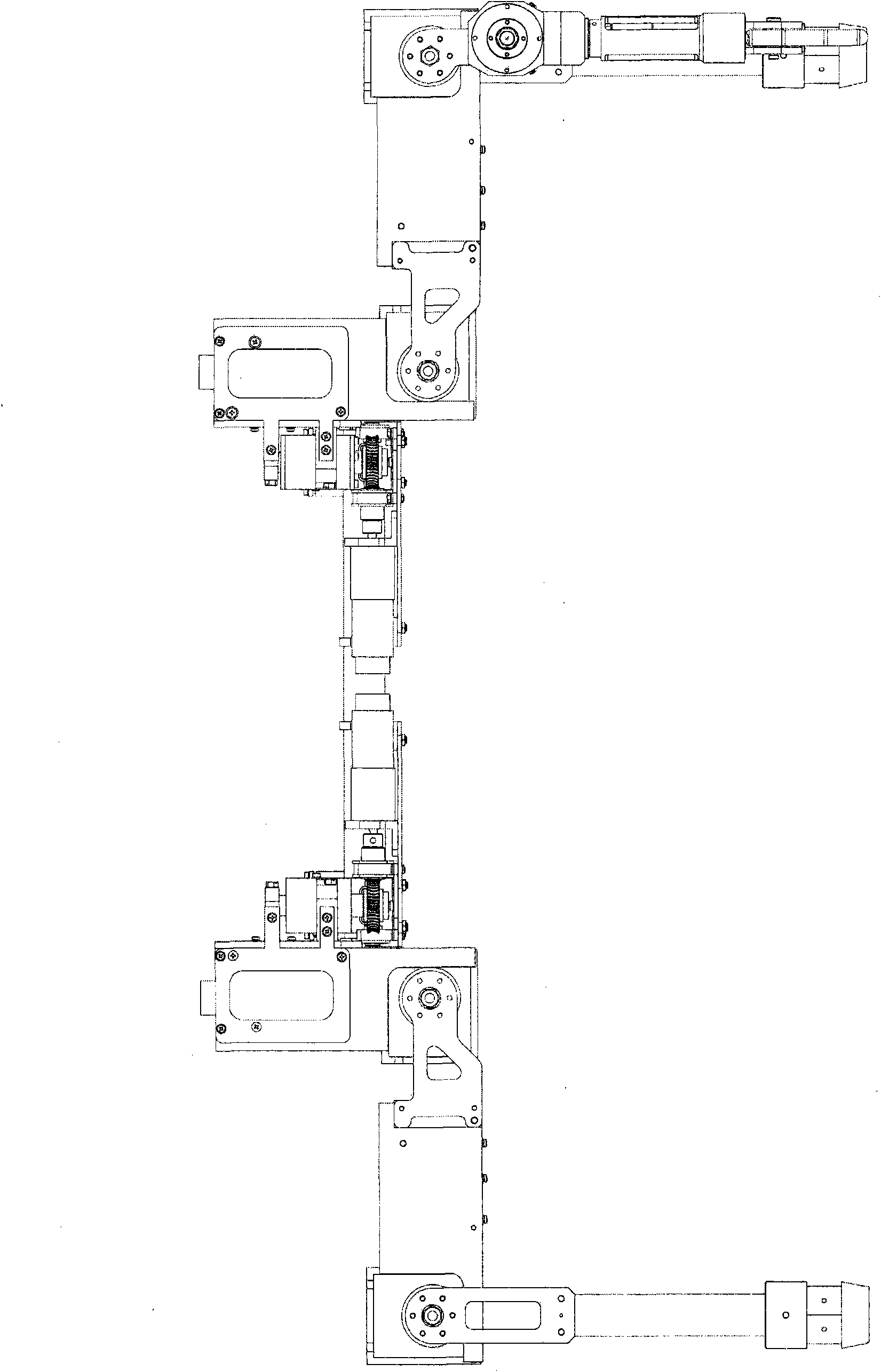
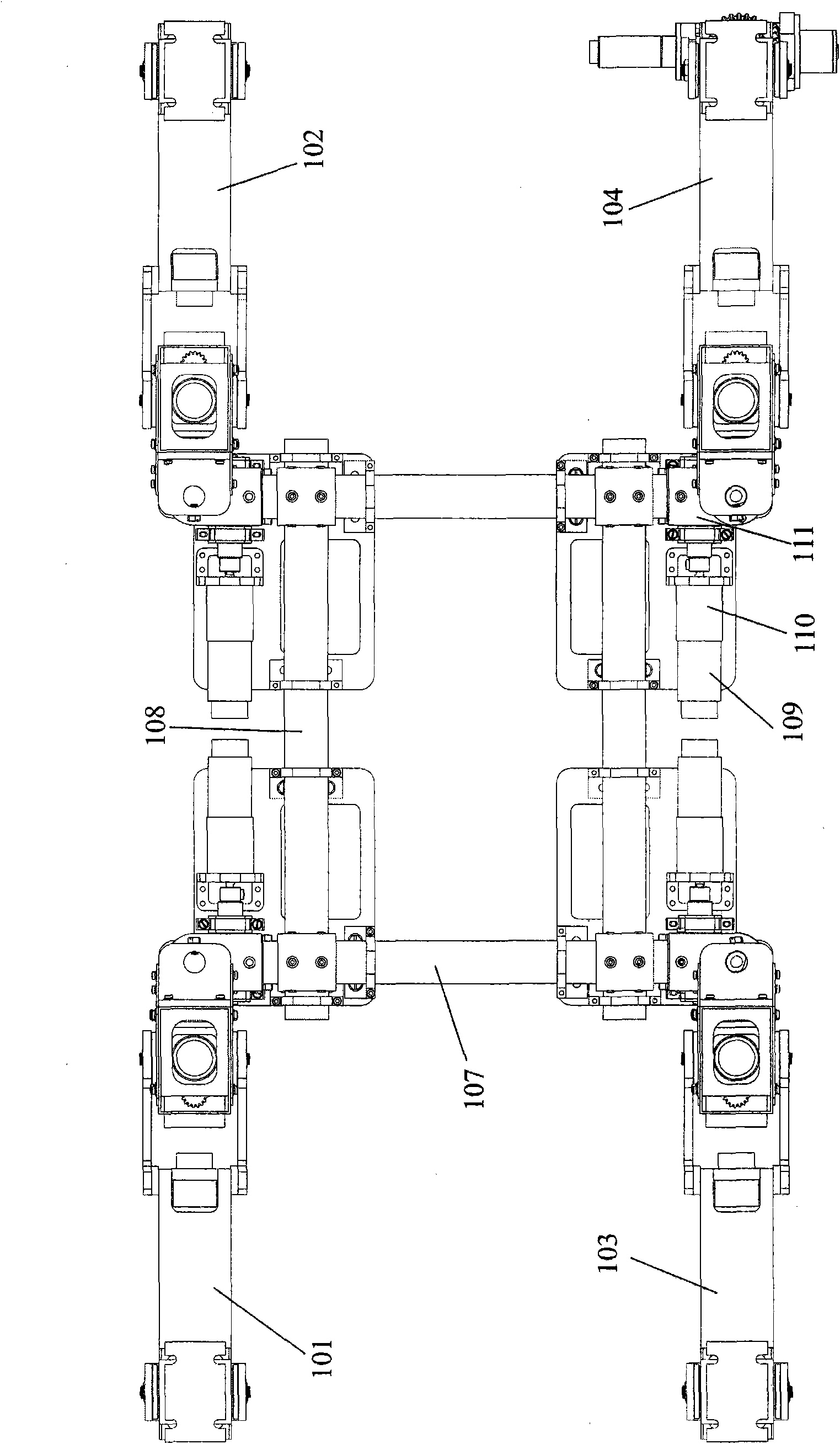
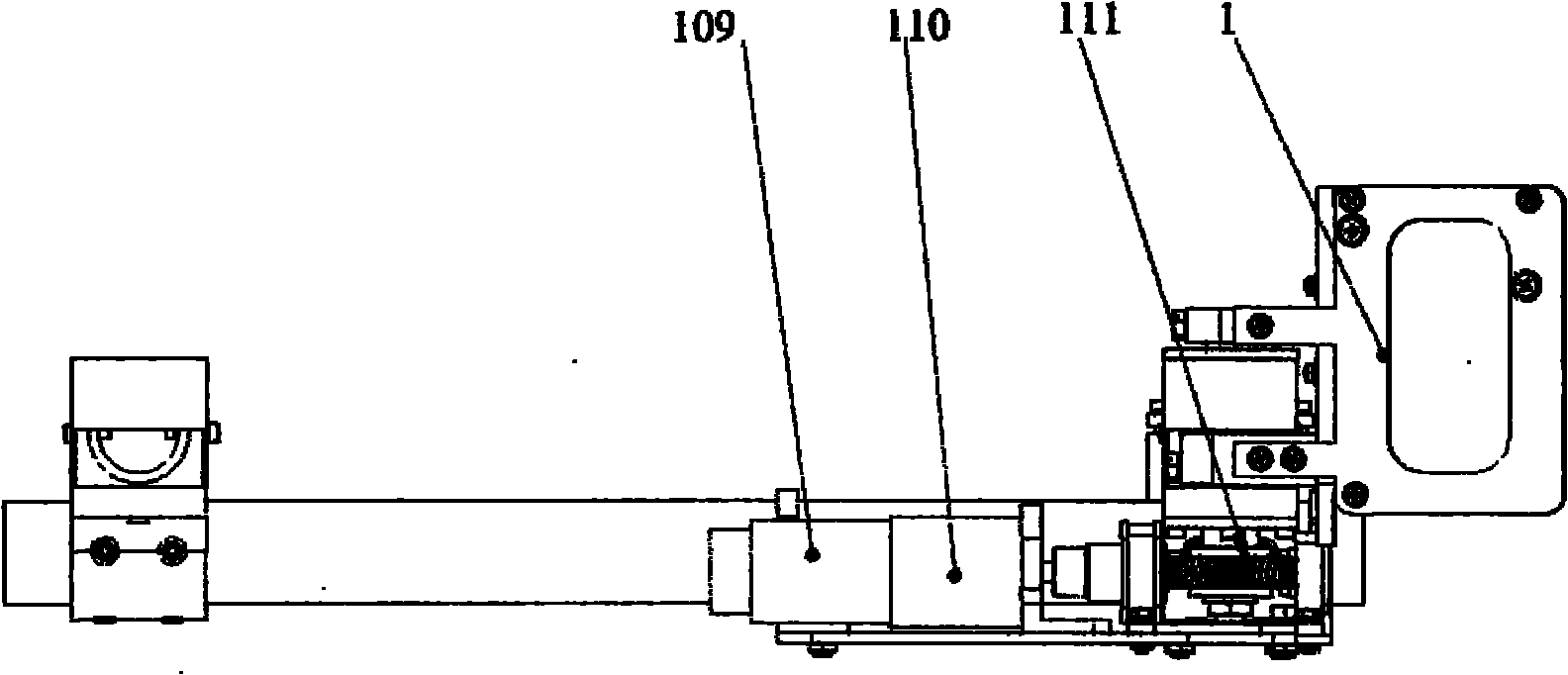
[0029] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 and Figure 9 As shown, in this embodiment, the modular multi-legged walking robot that can realize the function conversion of hands and feet includes a frame, a first foot unit 101, a second foot unit 102, and a third foot unit 103 distributed on the left and right sides of the frame. , the fourth foot unit 104, and a controller (not shown in the figure), at least one of the four foot units is Figure 4 In the illustrated foot unit with reusable hands and feet, the fourth foot unit 104 in this embodiment is a reusable foot unit with hands and feet, so as to facilitate the robot to grasp objects. The first foot unit 101, the second foot unit 102, the third foot unit 103 and the fourth foot unit 104 are all composed of the hip...
Embodiment 2
[0034] Such as Figure 10 and Figure 11 As shown, this embodiment is a hexapod robot. On the basis of the foregoing embodiments, the longitudinal beam 107 is lengthened, and a beam 108, the fifth foot unit 105 and the sixth foot unit 106 are added. Of course, the fifth foot unit 105 The place where the sixth foot unit 106 is connected to the frame also needs to be provided with a foot unit driving motor, a foot unit reducer and a corresponding worm gear transmission. In this hexapod robot, at least two foot units are foot units with reusable hands and feet. In this implementation, the fifth foot unit and the sixth foot unit are set as reusable foot units with hands and feet, and their lower leg units are as follows Figure 6 structure shown. At this point, the other four foot units can be used Figure 7 Foot unit shown.
[0035] Of course, in addition to the above-mentioned technical solutions, the detecting device connected to the motor may also be a resolver, and the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More