

Amphibious bionic turtle robot
A technology for robots and bionic turtles, applied in the field of robots, can solve the problems of reduced motion efficiency, difficult control, and incompatibility with work platforms, and achieve the effects of large carrying capacity, strong carrying capacity, and rich forms of movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in more detail below by means of examples and drawings, but the following examples are only illustrative, and the protection scope of the present invention is not limited by these examples.
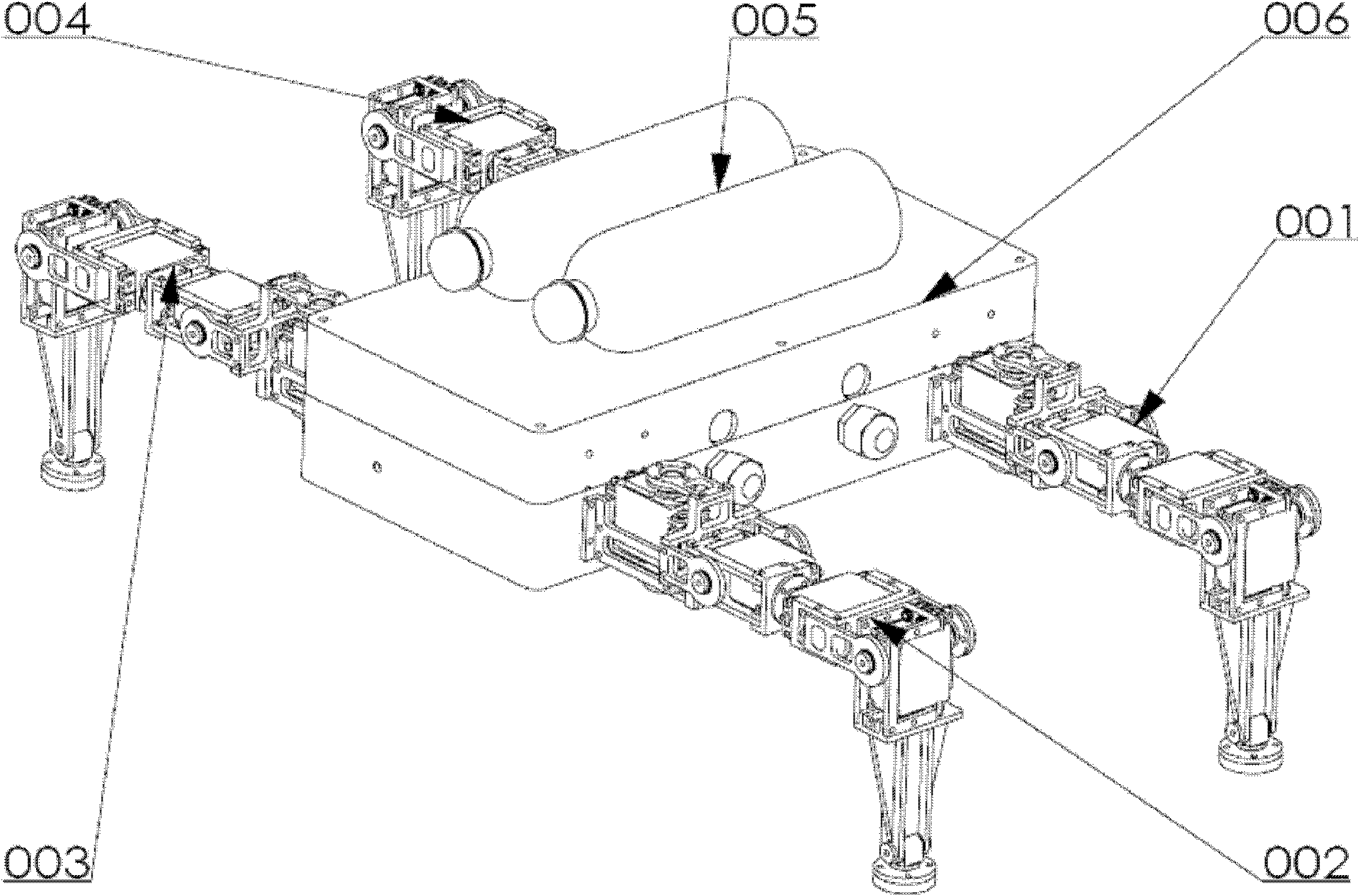
[0024] Such as figure 1 As shown, the robot includes first to fourth leg module units 001 , 002 , 003 , 004 , a buoyancy device 005 and a fuselage cabin 006 .
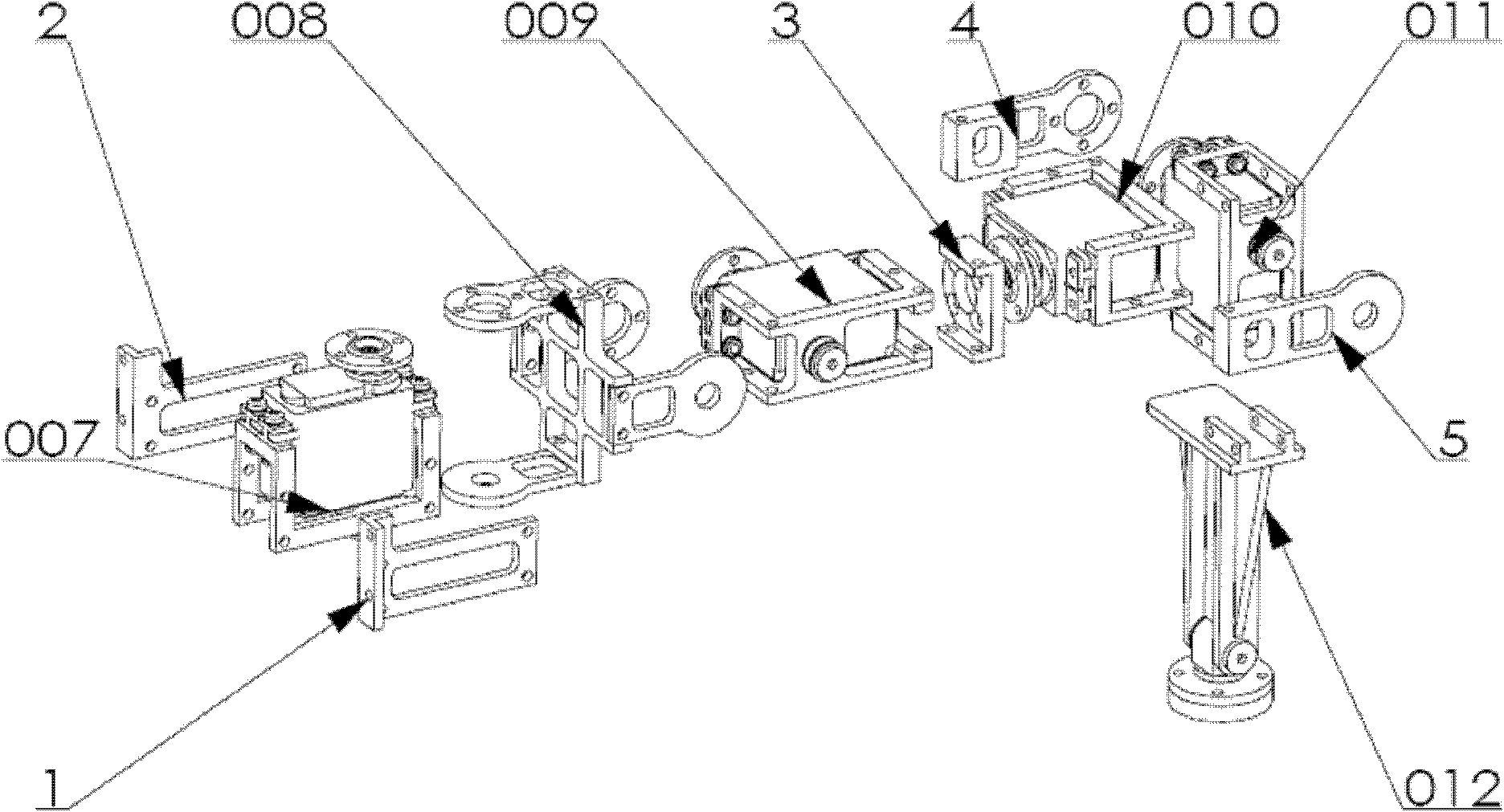
[0025] The leg module units 001, 002, 003, 004 have the same structure. Such as figure 2 As shown, each leg module unit includes first to fourth drive modules 007, 009, 010, 011, hip joint connection module 008, calf module 012, first and second L-shaped frames 1, 2, and a steering wheel Connecting piece 3, first and second connecting plates 4, 5;
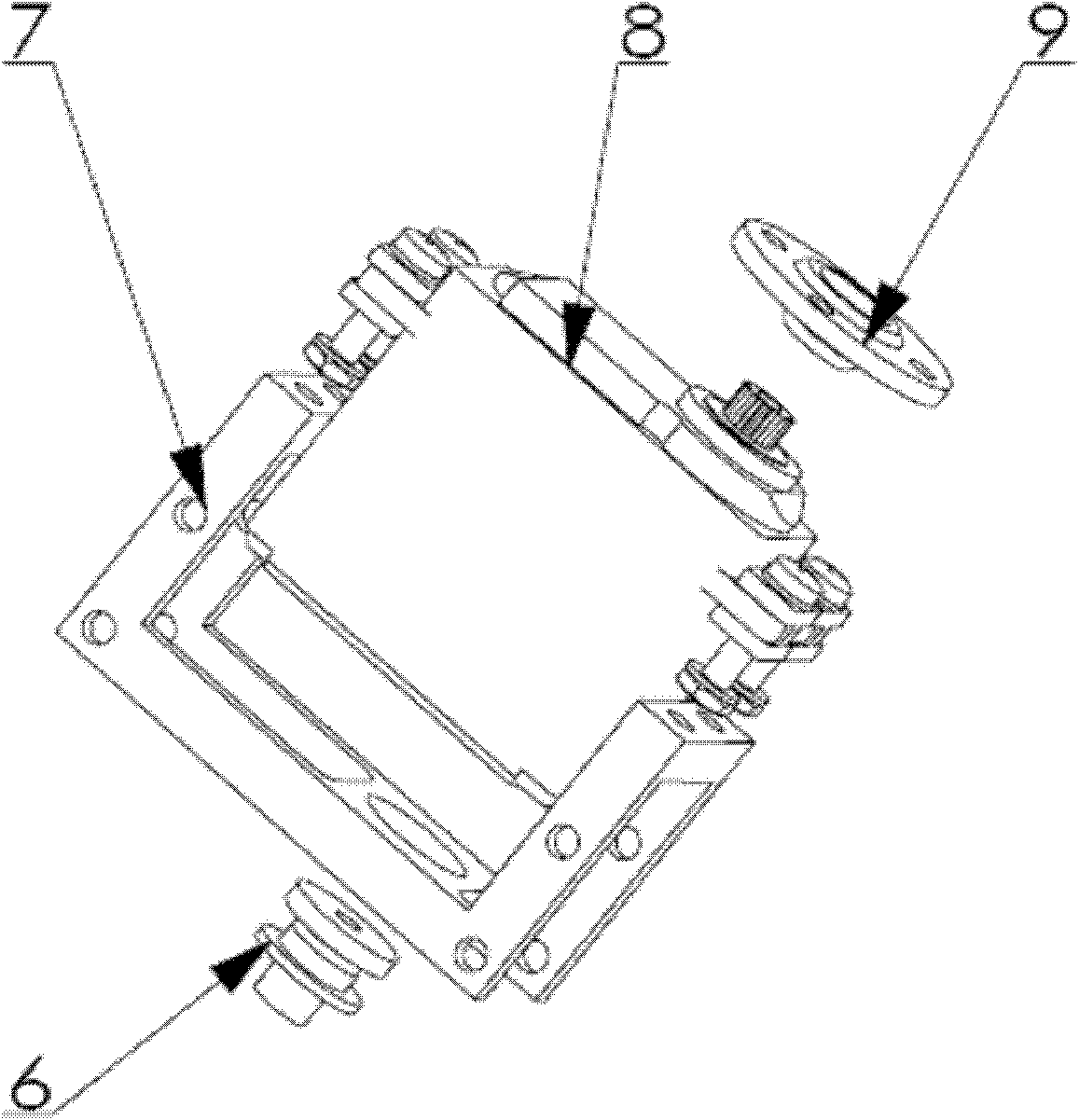
[0026] The four drive modules 007, 009, 010, 011 have exactly the same structure. Such as image 3 As shown, the structure of the robot drive module is: the drive unit 8 is fixed on the U-shaped main bracket 7, the tail shaft 6 is st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More