

Adhesive toe for gecko robot and movement method thereof
A robot and gecko imitation technology, applied in the field of bionic robots, can solve problems such as increased system complexity and energy consumption, small adhesion force of gecko, unfavorable adhesion force of simulated gecko, etc., to reduce control difficulty and weight Lightweight and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0049] combine Picture 1-1 , 1-2 , 1-3, 1-4, 1-5, 1-6, 1-7, the present embodiment is a flat plate-like adhesive toe structure design and its use method, including viscous material, rigid spring material, rubber flexible material , End fixture. Such as Picture 1-1 As shown, the viscous material is a double-sided viscous material. The viscous material is adhered to one side of the rubber flexible material. Corresponding fixation ensures that the adhesive material based on the rubber flexible material assumes the shape of a plate. Such as Figure 1-2 As shown in the figure, when sticking the flat toe, follow the sequence shown in the figure and its adhesion movement trajectory. In the early stage, the toe can be in contact with the smooth surface of the adhesion at a certain angle, and the root will form a certain arc forward after the contact begins. The movement, degree of curvature of the arc will affect the value of the maximum adhesion force. The end of the adhesive t...
specific Embodiment approach 2
[0056] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0057] combine diagram 2-1 , 2-2 , 2-3, 2-4, 2-5, this embodiment is a semi-arc adhesive toe structure design and its use method, including viscous material, rigid spring material, rubber flexible material, and end fixing device. Such as diagram 2-1 As shown, the viscous material is a double-sided viscous material. The viscous material is adhered to one side of the rubber flexible material. Corresponding fixation ensures that the adhesive material based on the rubber flexible material presents a semi-curved shape. Such as Figure 2-2 As shown, the semi-arc-shaped adhesion of the toe can be adhered according to the sequence shown in the figure and its adhesion movement track 1. In the early stage, the toe can be in parallel contact with the smooth surface of the adhesion, and the root will form a certain arc backward after the contact begin...
specific Embodiment approach 3
[0058] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
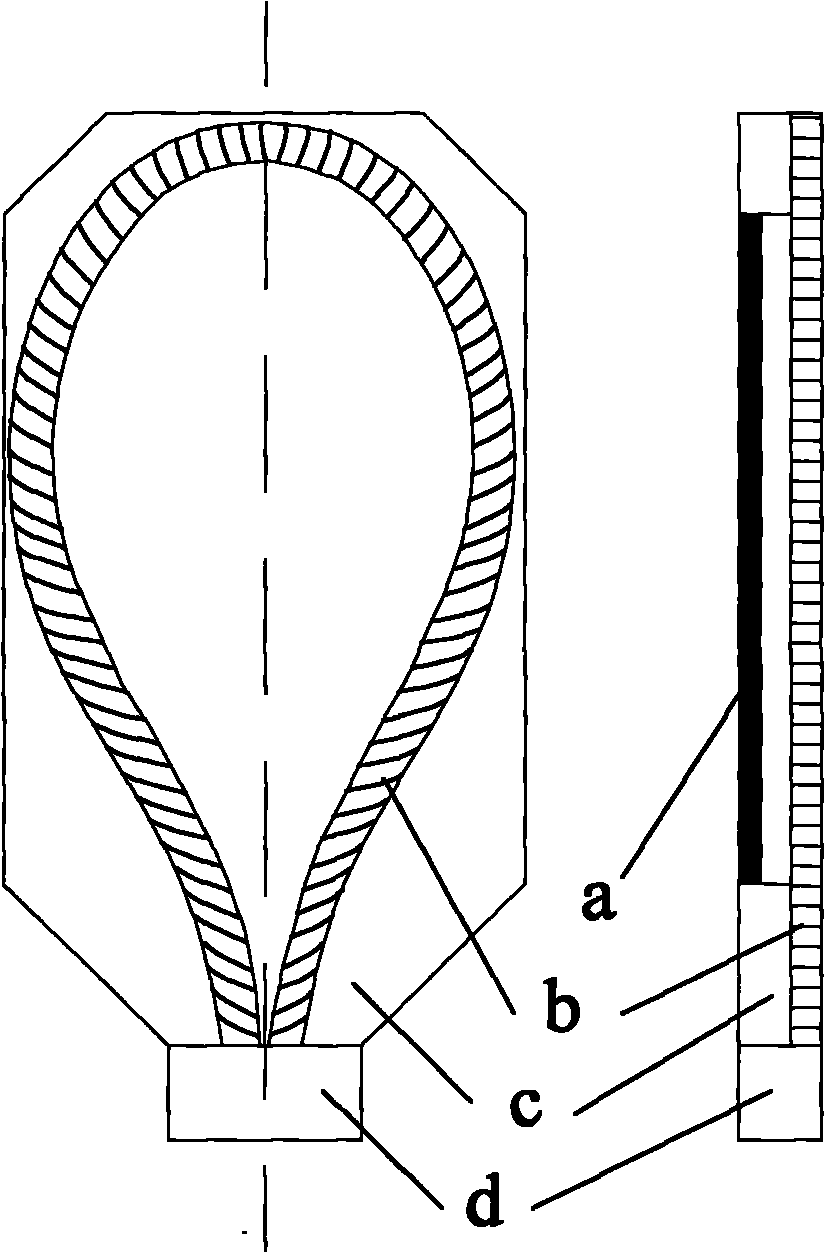
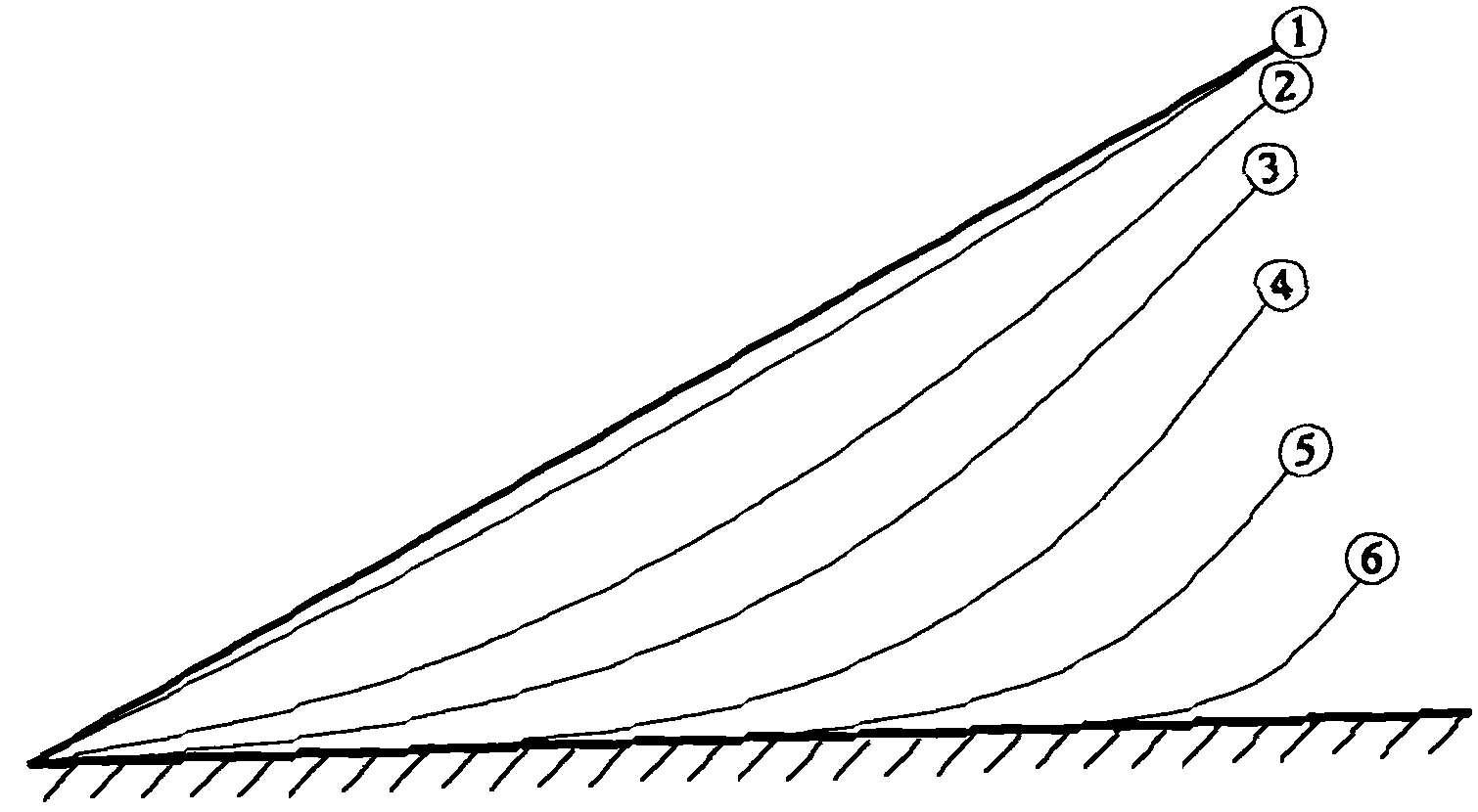
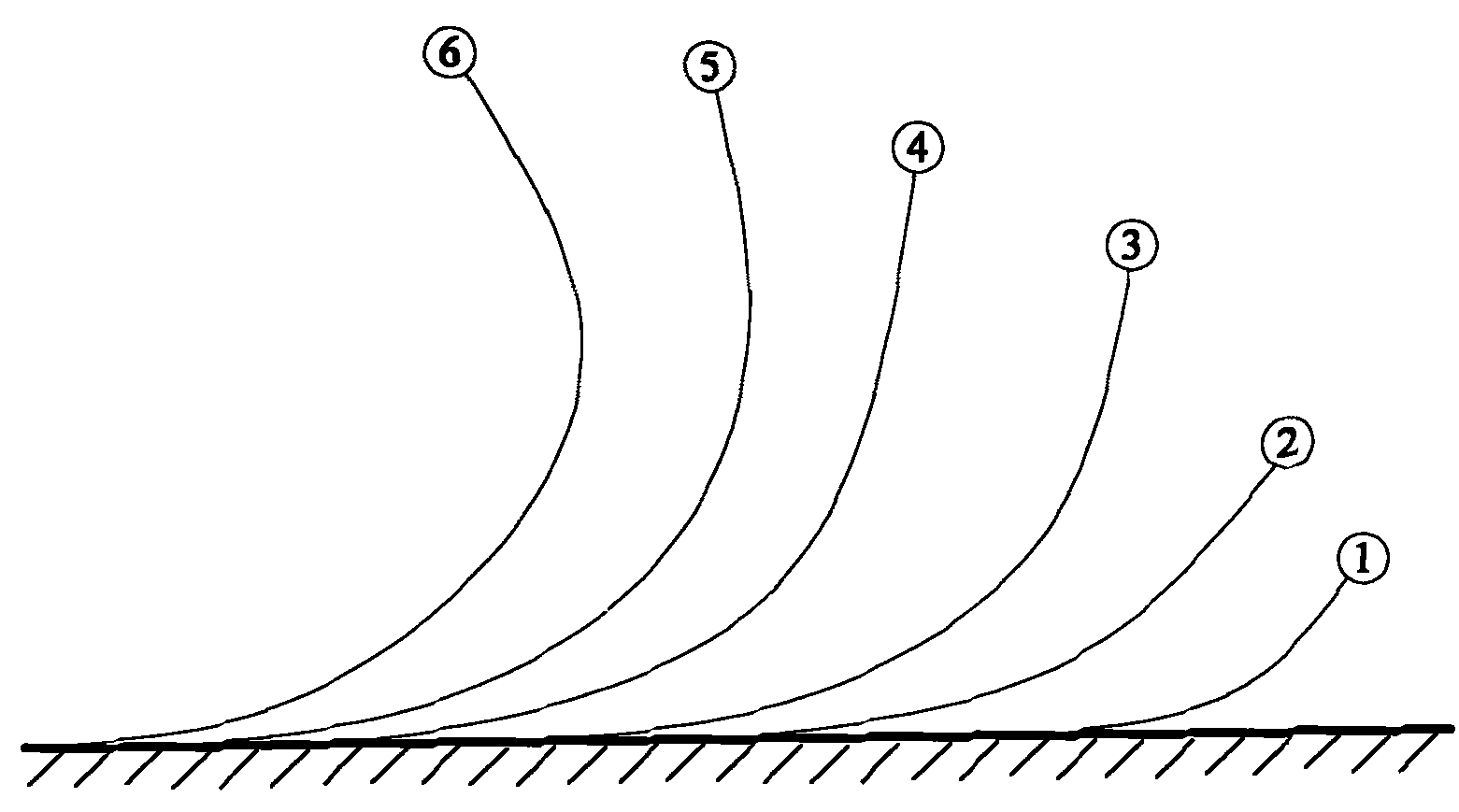
[0059] combine Figure 3-1 , 3-2 , 3-3, this embodiment is a full arc adhesive toe structure design and its use method, including viscous material, rigid spring material, rubber flexible material, and end fixing device. Such as Figure 3-1 As shown, the adhesive material is a double-sided adhesive material, and the adhesive material is adhered to one side of the rubber flexible material, and the rigid spring material and the rubber flexible material are fixed by the end fixing device at the root of the toe, so as to ensure that the adhesive material based on the rubber flexible material Presents a full arc. Such as Figure 3-2 As shown in the figure, when the full-arc adhesive toes are adhered, the sequence shown in the figure and the adhesive movement track can be followed. In the early stage, the toes can be placed in vertical contact with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More