

Celestial autonomous navigation method based on star sensors
A star sensor and autonomous navigation technology, applied in the field of astronomical navigation, can solve the problems of difficult to establish atmospheric mathematical model, reduce the output attitude of the star sensor, etc., to avoid measurement and control errors and improve measurement accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
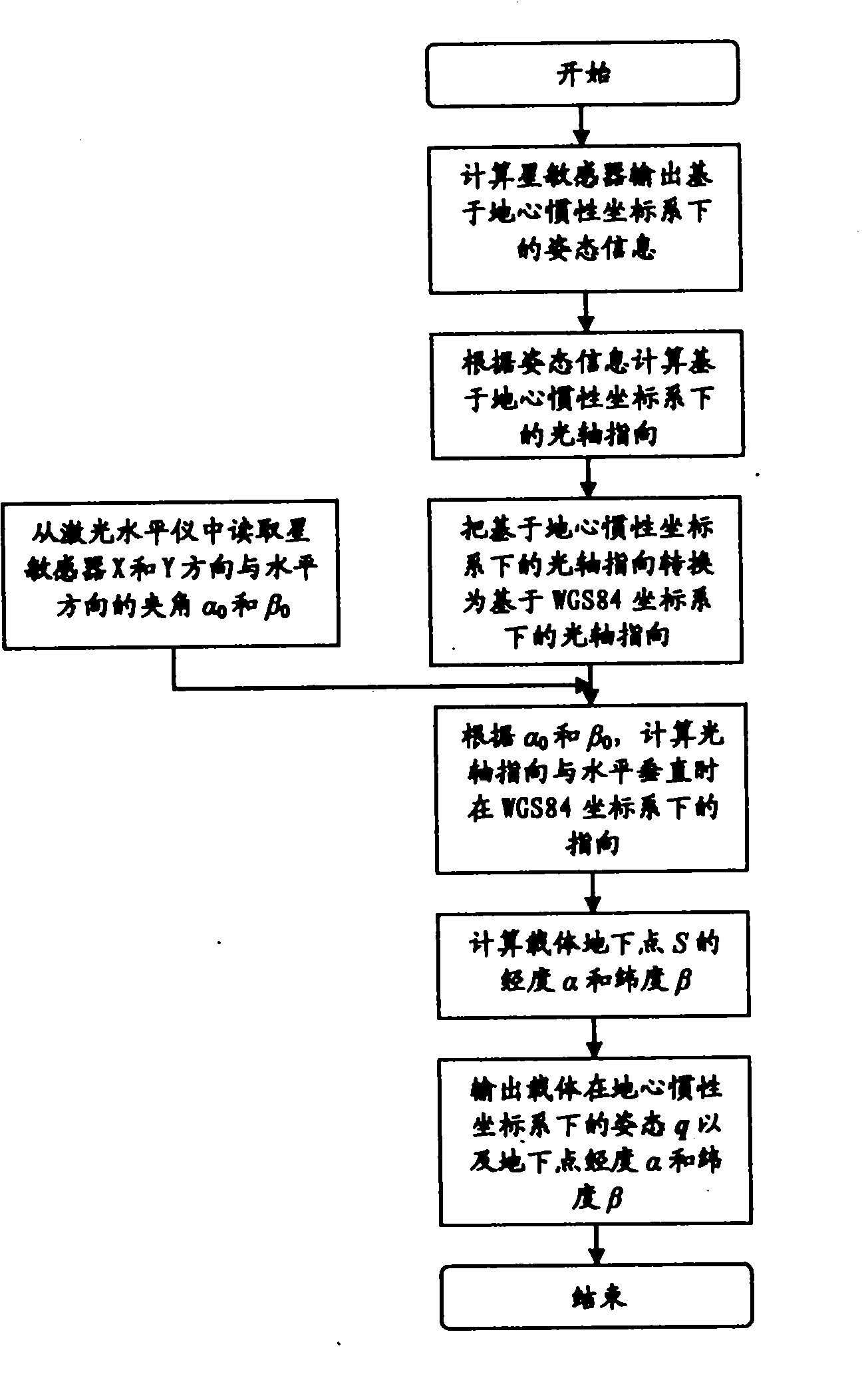
[0029] Example 1: Combining figure 1 , figure 2 A kind of celestial self-navigation method based on star sensor of the present invention, the steps are as follows:
[0030] Step 1: Calculate the attitude information that the star sensor outputs based on the earth-centered inertial coordinate system;
[0031] Step 2: Calculate the direction of the optical axis based on the geocentric inertial coordinate system according to the attitude information;
[0032] Step 3: Convert the optical axis pointing based on the geocentric inertial coordinate system to the optical axis pointing based on the WGS84 coordinate system; read the angle α between the X and Y directions of the star sensor and the horizontal direction from the laser level 0 and beta 0 ;
[0033] Step 4: According to α 0 and beta 0 Calculate the direction of the optical axis in the WGS84 coordinate system when the direction of the optical axis is perpendicular to the horizontal;
[0034] Step 5: Calculate the long...
Embodiment 2
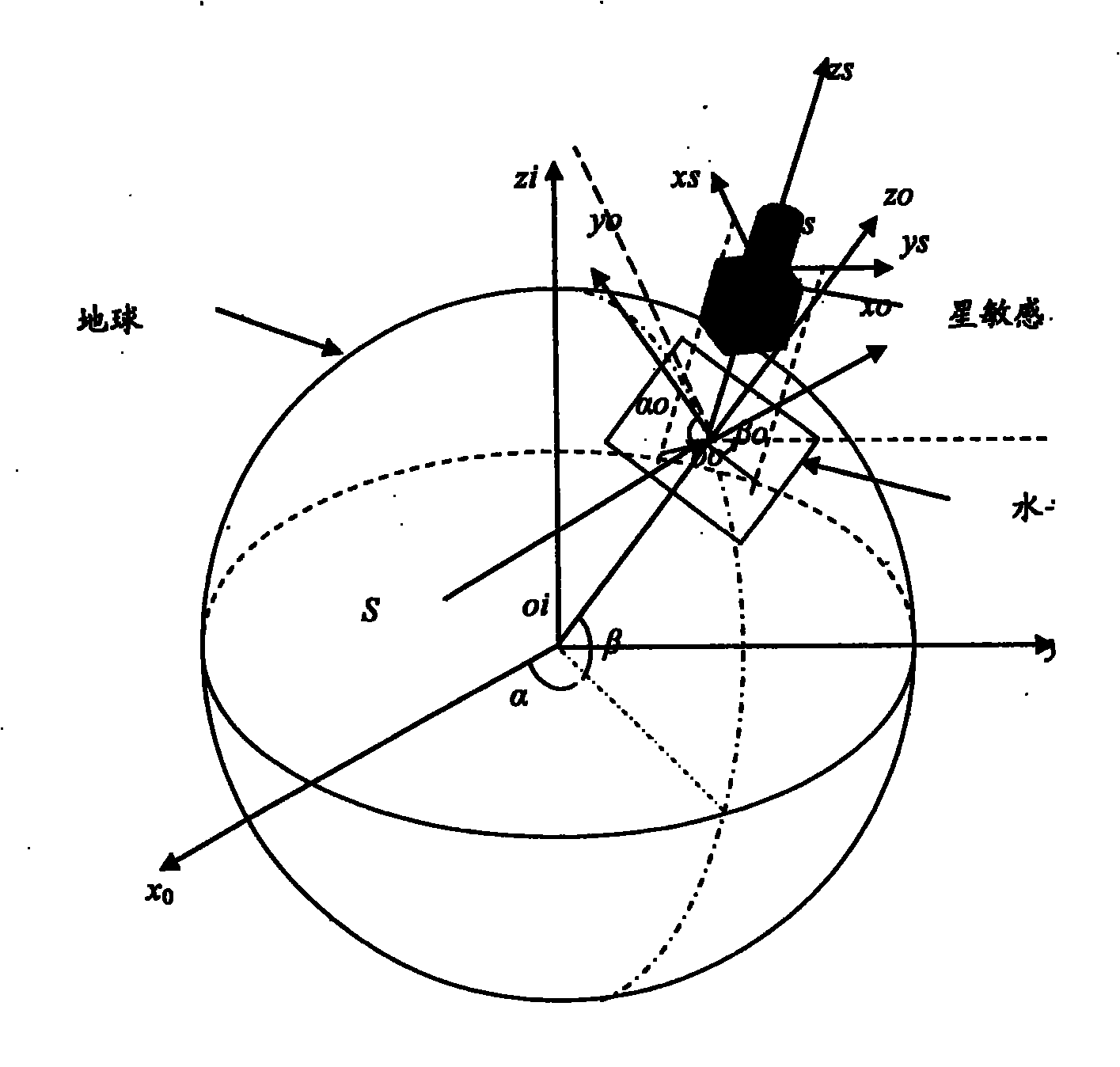
[0036] Example 2: Combining Figure 1-Figure 4In order to truly realize autonomous navigation, the celestial navigation system mainly needs to solve the following problems: get rid of the constraint of horizontal reference provided by inertial equipment and obtain the physical quantity of carrier navigation information. It can be seen that to get rid of the restriction of the horizontal reference and to seek the measurement physical quantity of the carrier navigation information is the necessity of realizing high-precision astronomical navigation. The purpose of the invention is to set up an astronomical autonomous navigation system based on a star sensor. The whole system as figure 1 shown. Each coordinate system is defined as follows:
[0037] Geocentric inertial coordinate system O 0 -x 0 the y 0 z 0 : Coordinate origin O 0 At the Earth's center of mass, x 0 Axis points to T 0 The equinox of the moment, z 0 Axis points to T 0 the flat pole of the moment, y 0 ax...
Embodiment 3
[0087] Example 3: Binding Figure 5 , Figure 6 , the present invention is an astronomical autonomous navigation method based on a star sensor, which includes three subsystems: a star sensor system and two laser level measurement systems. The three-axis attitude of the main carrier of the star sensor; the two laser level measurement systems mainly measure the angle between the two axes of the carrier and the horizontal plane.
[0088] Working process: The star is imaged on the image plane of the star sensor (such as CCD or APS) through the optical lens of the star sensor, and the imaging circuit converts the electrical signal of the star in the image plane into a complete star map and stores it in the memory ; The star image extraction software reads the star map data in the memory, and extracts the star image coordinates from the star map; (if the star sensor has prior information, the star map recognition software uses the star tracking algorithm); the attitude calculation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More