

Robot revolute joint module with single degree of freedom
A technology of rotary joints and robots, which is applied in the field of robots, can solve the problems of unsatisfactory weight-torque ratio, difficulty in meeting a wide range of needs, and many degrees of freedom of modules, and achieve the effects of light weight, small axial size, and good reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to better understand the present invention, the model will be further described below in conjunction with the accompanying drawings.
[0019] like figure 1 Shown is the appearance of this joint module. There is no direct connection between the joint base 02 and the output sleeve 07 in the figure, but the two can relatively rotate around the central axis through other parts.
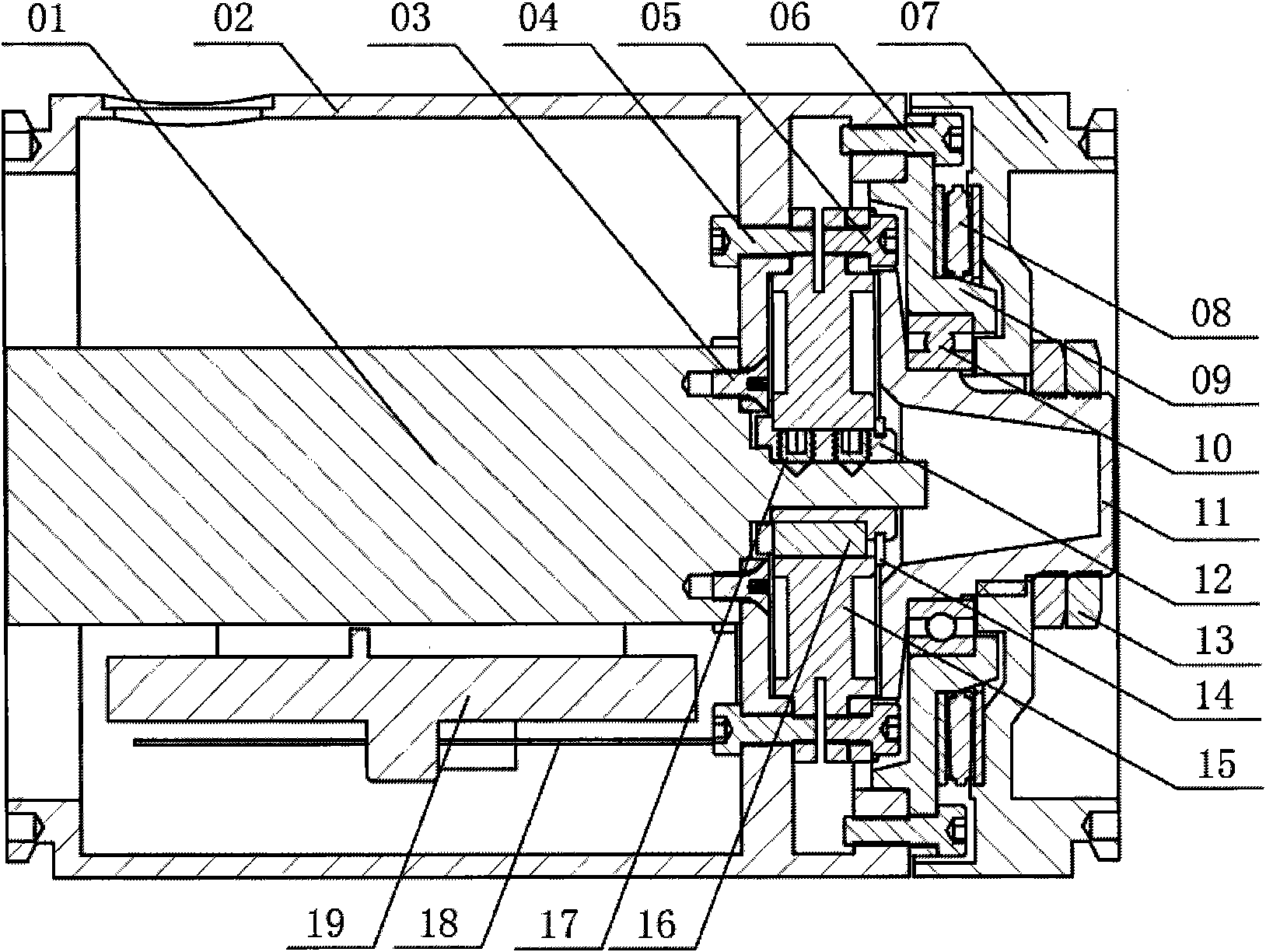
[0020] like figure 2 Shown is a cross-sectional view of this joint module. exist figure 2 In , the relative rotation axis of the joint module coincides with the central axis of the module itself. Parts include: servo motor and photoelectric encoder assembly 01, joint base 02, motor fixing screw 03, harmonic reducer input axial fixing screw 04, harmonic reducer output axial connecting screw 05, hexagon socket screw 06. Output sleeve 07, needle roller one-way thrust bearing 08, end cover bearing seat 09, deep groove ball bearing 10, harmonic reducer output disc 11, shaft sleeve 12, ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More