

Parallel-connected torque control system and method for hydraulic hybrid power vehicles
A hybrid power system and hybrid vehicle technology, applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve the problems of unreasonable energy distribution and inability to optimize the fuel economy of the whole vehicle, so as to avoid adverse effects, Best fuel economy and high reliability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] Embodiment 1: The control system and method include a hydraulic hybrid vehicle control method and a hydraulic hybrid vehicle torque control system;
[0035] Control methods for hydraulic hybrid vehicles:
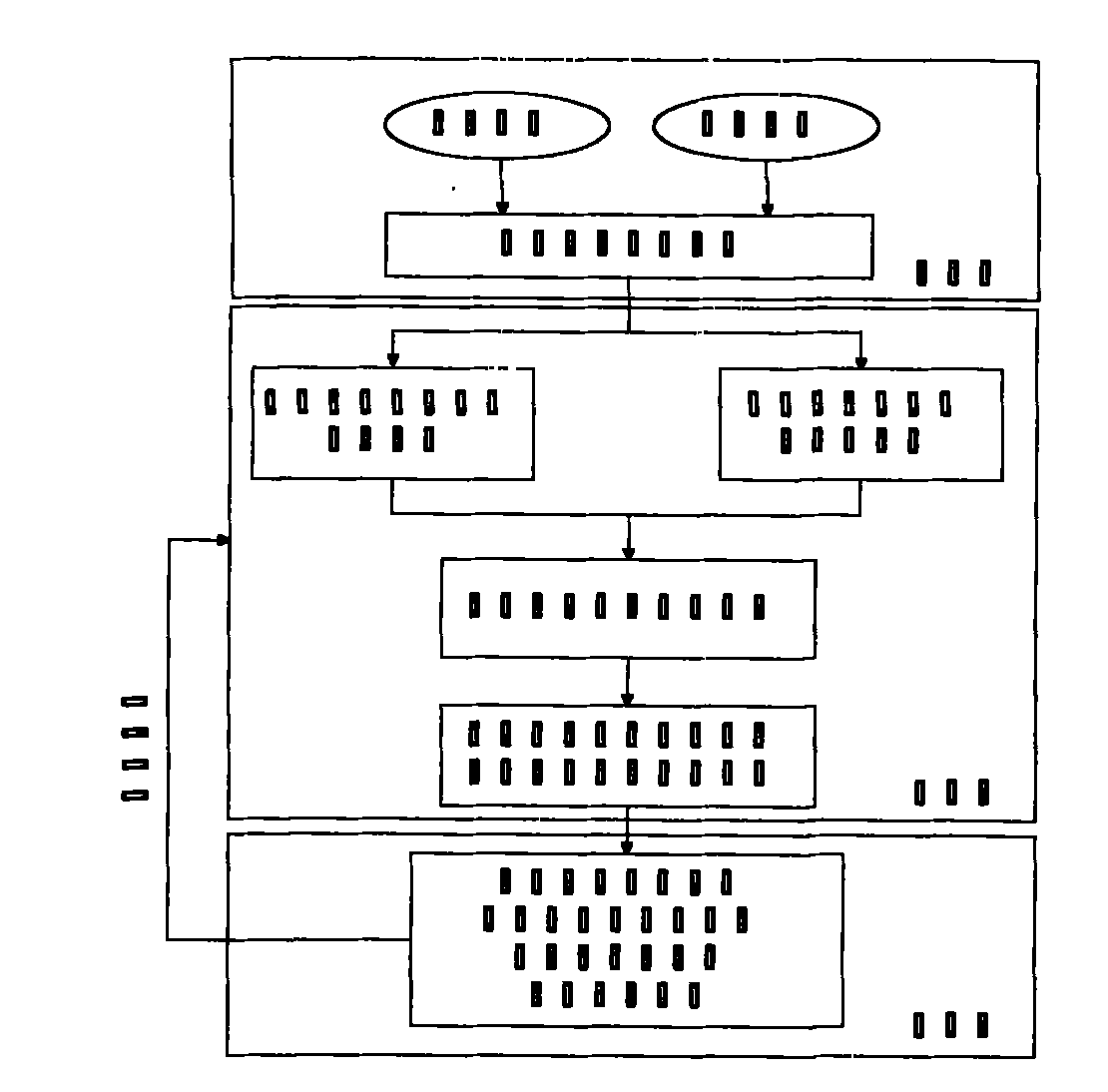
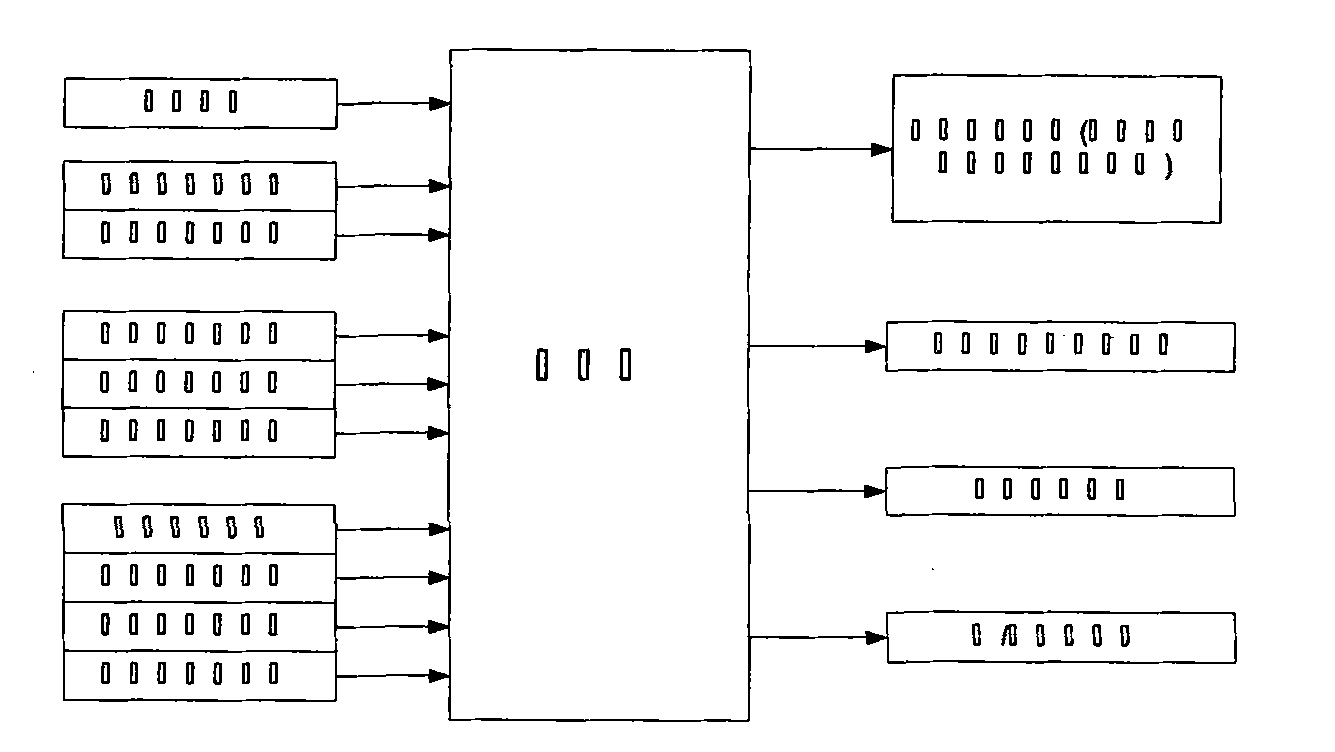
[0036] (1) According to the driver's operation behavior on the accelerator pedal, combined with the vehicle speed in the current state, determine the vehicle drive target torque of the vehicle in the current state, the estimation of the torque of the hydraulic hybrid power system in the current state, and the target torque of the hybrid power system Determination of output torque, engine target output torque command and hydraulic pump motor target output torque command;
[0037] The method for realizing the vehicle driving target torque is: according to the opening degree of the accelerator pedal and the pedal change rate, it is converted into the target driving torque of the vehicle at different speeds and different gears;
[0038] The method for estimating the torq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More