

Test device for static properties of triaxial miniature accelerometer and test method thereof
An accelerometer and static performance technology, applied in the testing/calibration of speed/acceleration/shock measurement equipment, speed/acceleration/shock measurement, and measurement devices, etc., can solve the problem of reducing measurement accuracy, complex structure, and improving measurement efficiency etc. to achieve the effect of reducing test cost, simplifying the overall structure and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to describe the technical solution of the present invention in detail.
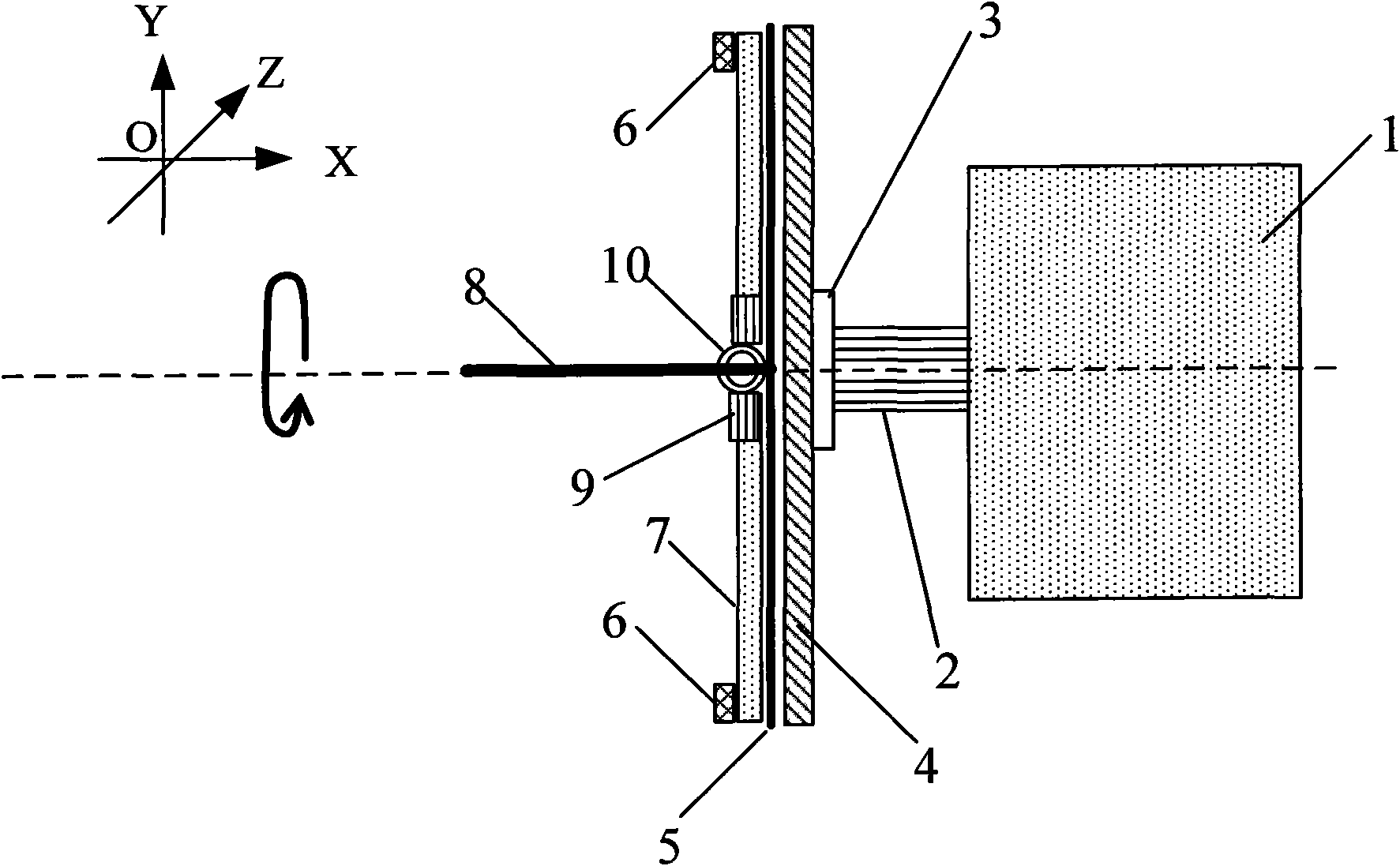
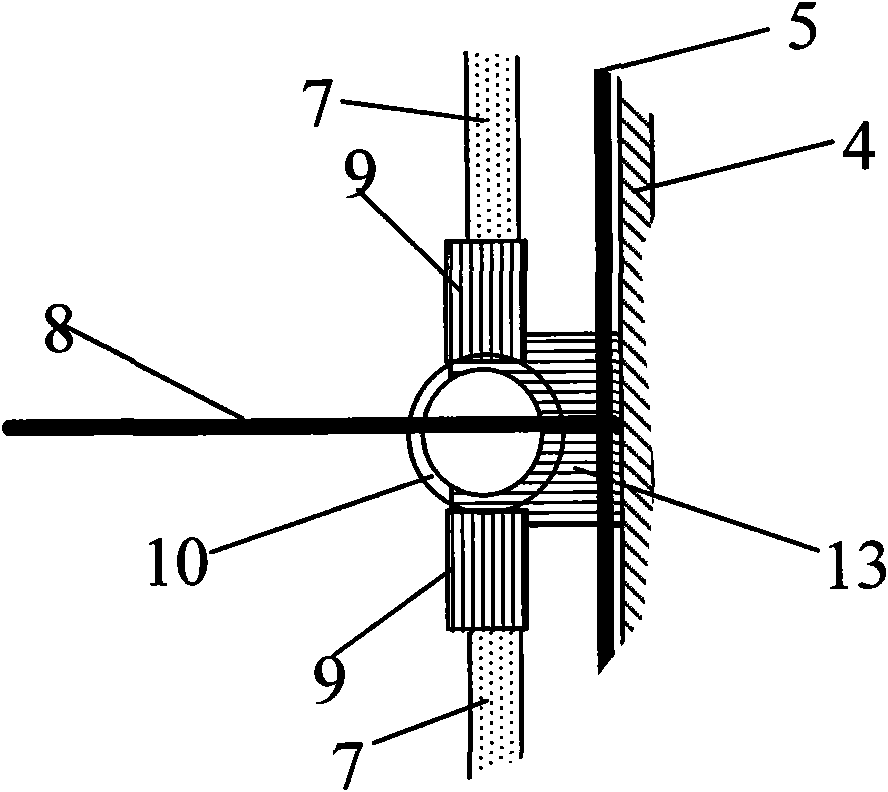
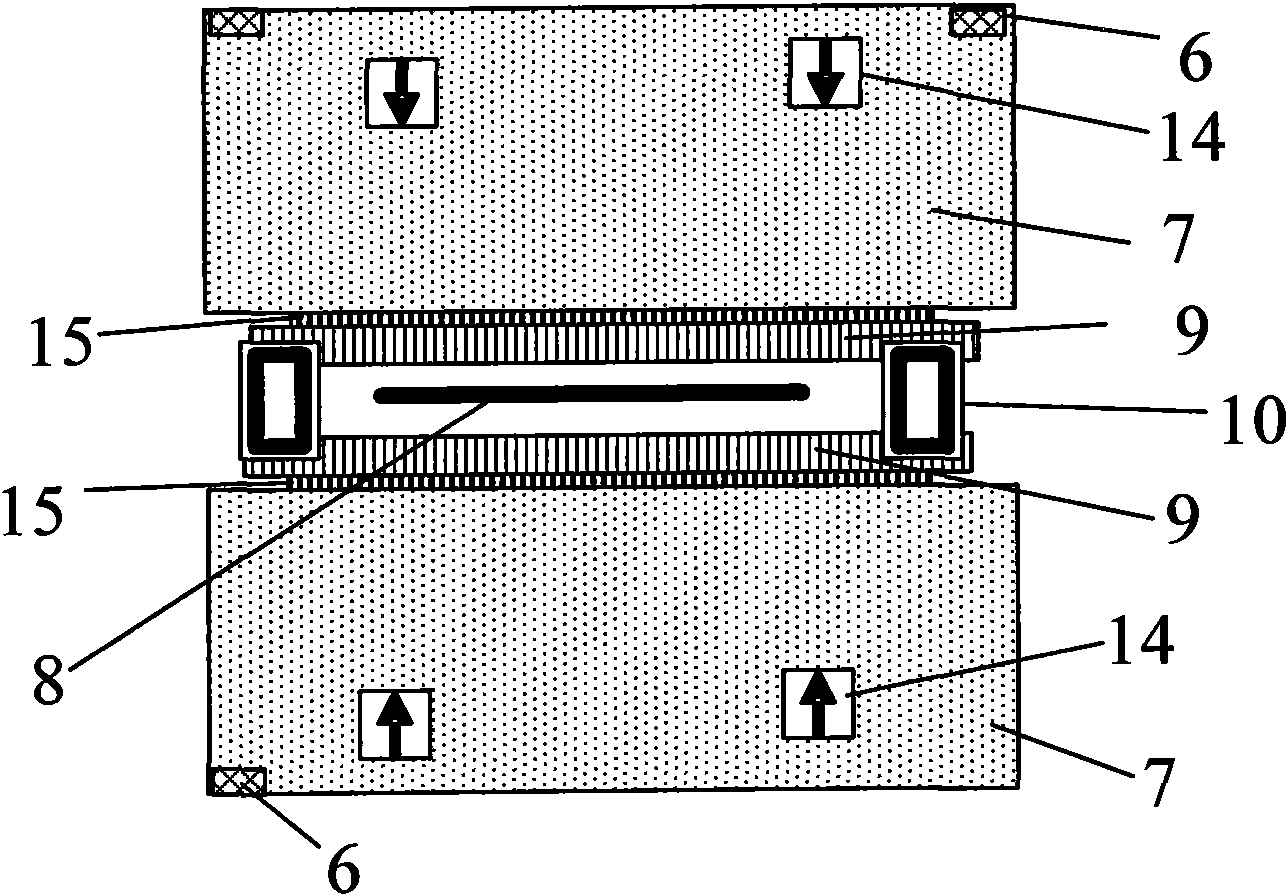
[0027] The invention provides a test device and a test method for the static performance index of a three-axis miniature accelerometer. like Figure 1-5 As shown, the device for testing the typical performance indicators of the three-axis micro accelerometer in the present invention includes: motor 1, transmission shaft 2, flange 3, test motherboard 4, Y direction positioning plate 5, spacer block 6, test board 7, X direction The positioning board 8 , the slot 9 , the rotating device 10 , the connecting device 13 , the positioning slot 14 of the device under test and the lead bar 15 on the test board 7 . The motor 1 provides power for the rotation of the test platform, and the test platform can rotate along the direction of rotation; the transmission shaft 2 is the power transmission de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More