

Method and device for stopping manipulator
A manipulator and robot technology, applied in engineering safety devices, instruments, simulators, etc., can solve the problem of high monitoring costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
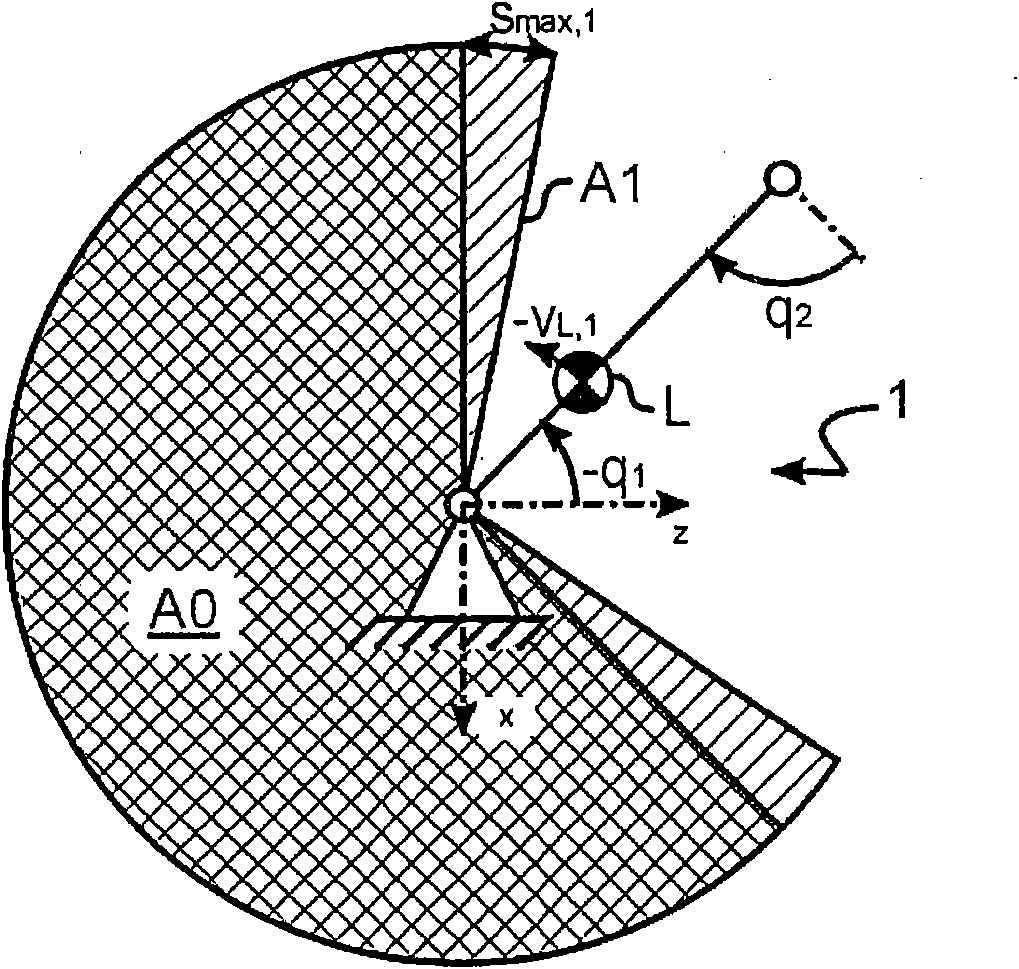
[0038] For better overview, the invention is described below with reference to simplified examples. for this in figure 1 with figure 2 is shown with two limbs 1.1, 1.2 (see figure 2 ) of a two-axis bent-arm robot 1, the two limbs 1.1, 1.2 are connected to each other by a revolving joint, and the joint angle q of the revolving joint 1 or q 2 Can be adjusted by the driving device to move the load L, the inertia parameters of the load L, especially the mass m, the center of gravity position r TCP.L and the moment of inertia or inertia tensor J relative to the tool center point TCP L is known.
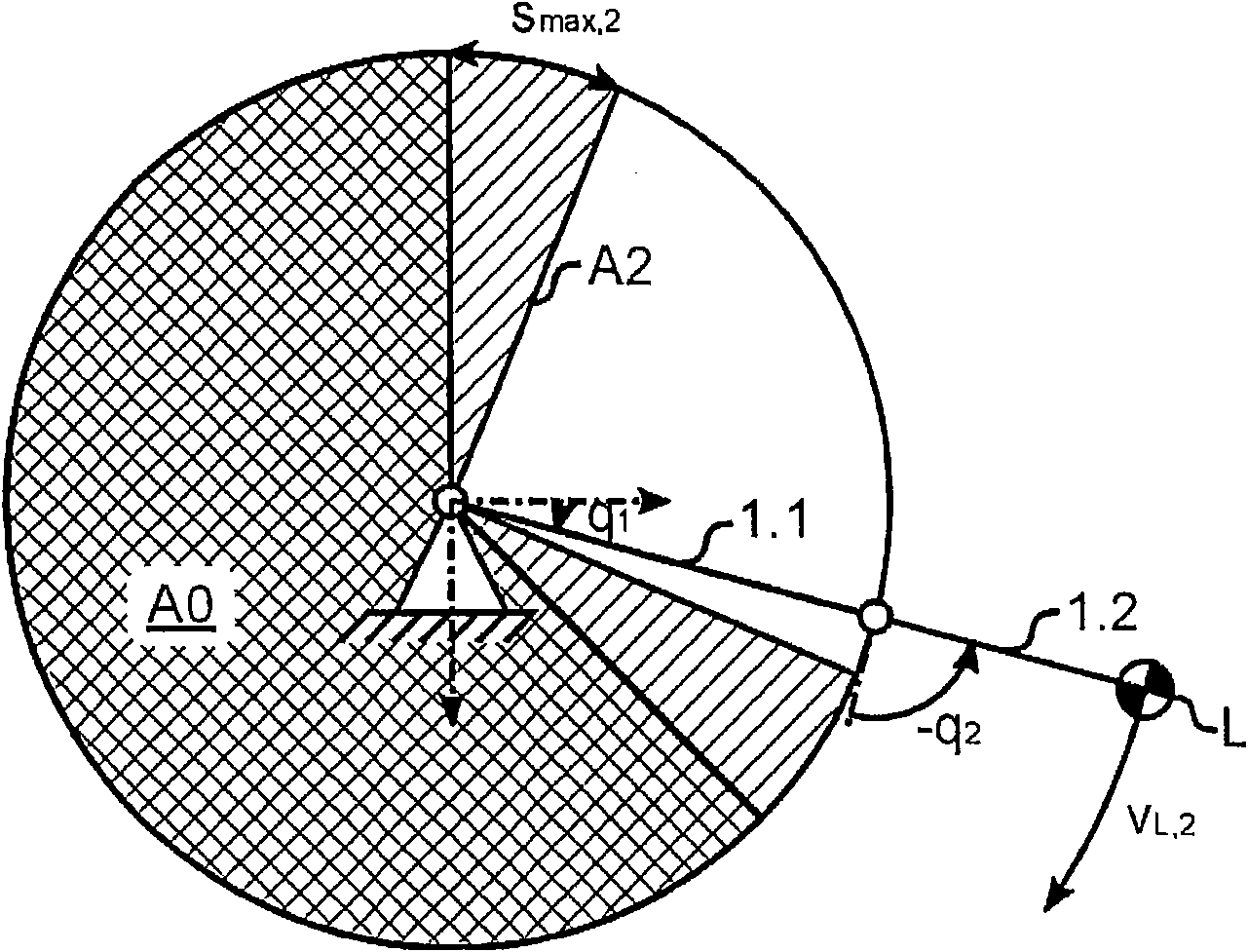
[0039] exist figure 1 In , robot 1 utilizes the folded arm 1.2(q 2 =90°) to make the load L move at a Cartesian velocity V on a circular trajectory L,1 Move upwards (v figure 2 Using the open arm 1.2 and with a large angular velocity dq 1 / dt Movement down.
[0040] In order to protect operators and equipment and avoid self-collision, it is set in the foundation of robot 1 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More