

Inertial-navigation quick and initial alignment method under robust optimal significance
An initial alignment, robust technique, applied in the field of robust control theory, which can solve problems such as lack of understanding of statistical properties, system model perturbation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the technical problems, solutions, technical ideas, and technical solutions of the present invention clearer, the implementation process of the rapid initial alignment of the inertial navigation system will be further described in detail below with reference to the accompanying drawings.
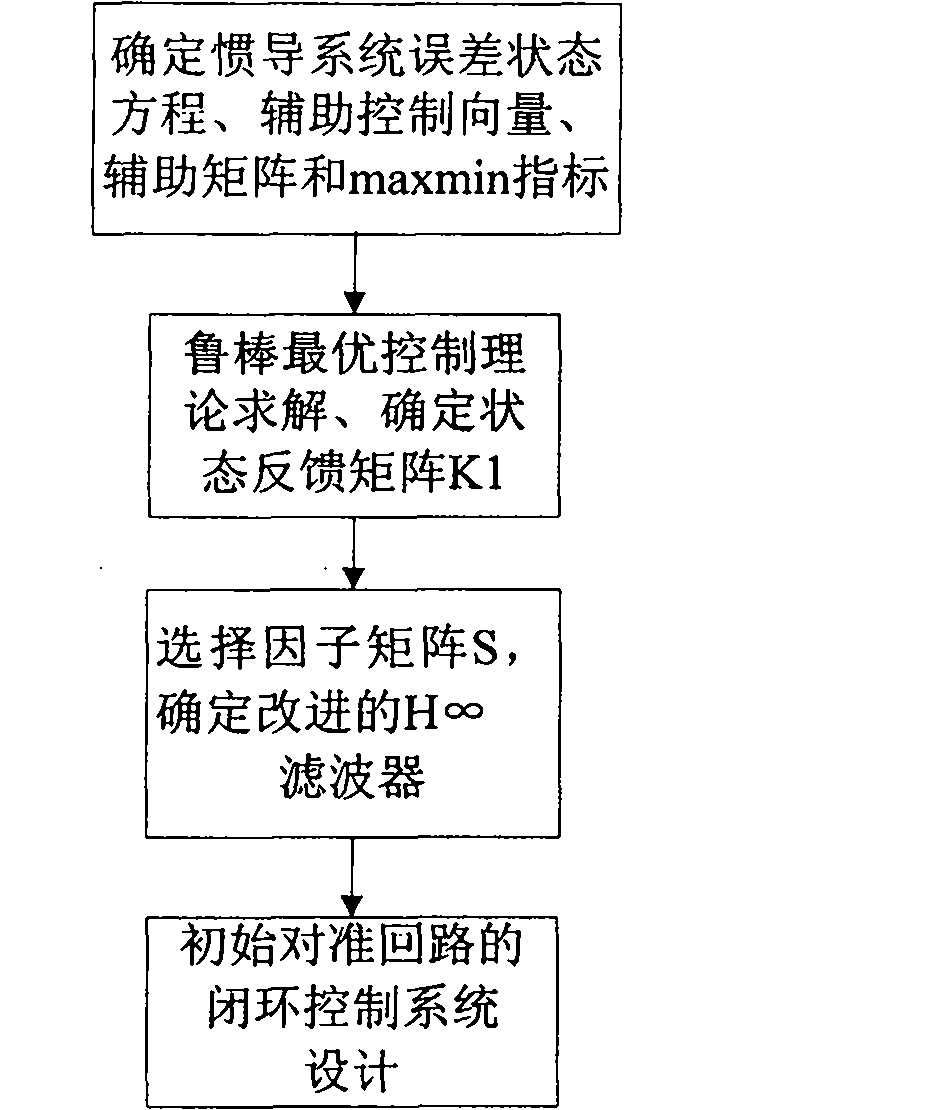
[0042] The initial alignment involved in the present invention is a key process before the navigation program of the inertial navigation system enters the navigation positioning solution, and represents the highest precision of the navigation system. Such as figure 1 As shown, the initial alignment design process includes the following key steps: First, determine the inertial navigation system error state equation, auxiliary control vector u, auxiliary matrix B 1 and maxmin index; secondly, use the robust optimal control theory to solve and determine the state feedback matrix K 1 ; Then, select the factor matrix S, for H ∞ The filter is improved; finally, the closed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More