Linear neuron on-line learning adaptive control method and controller for passive system
A technology of adaptive control and passive system, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of many manual interface parameters, unfavorable debugging and maintenance by ordinary operators, and difficult porting of configuration platforms, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
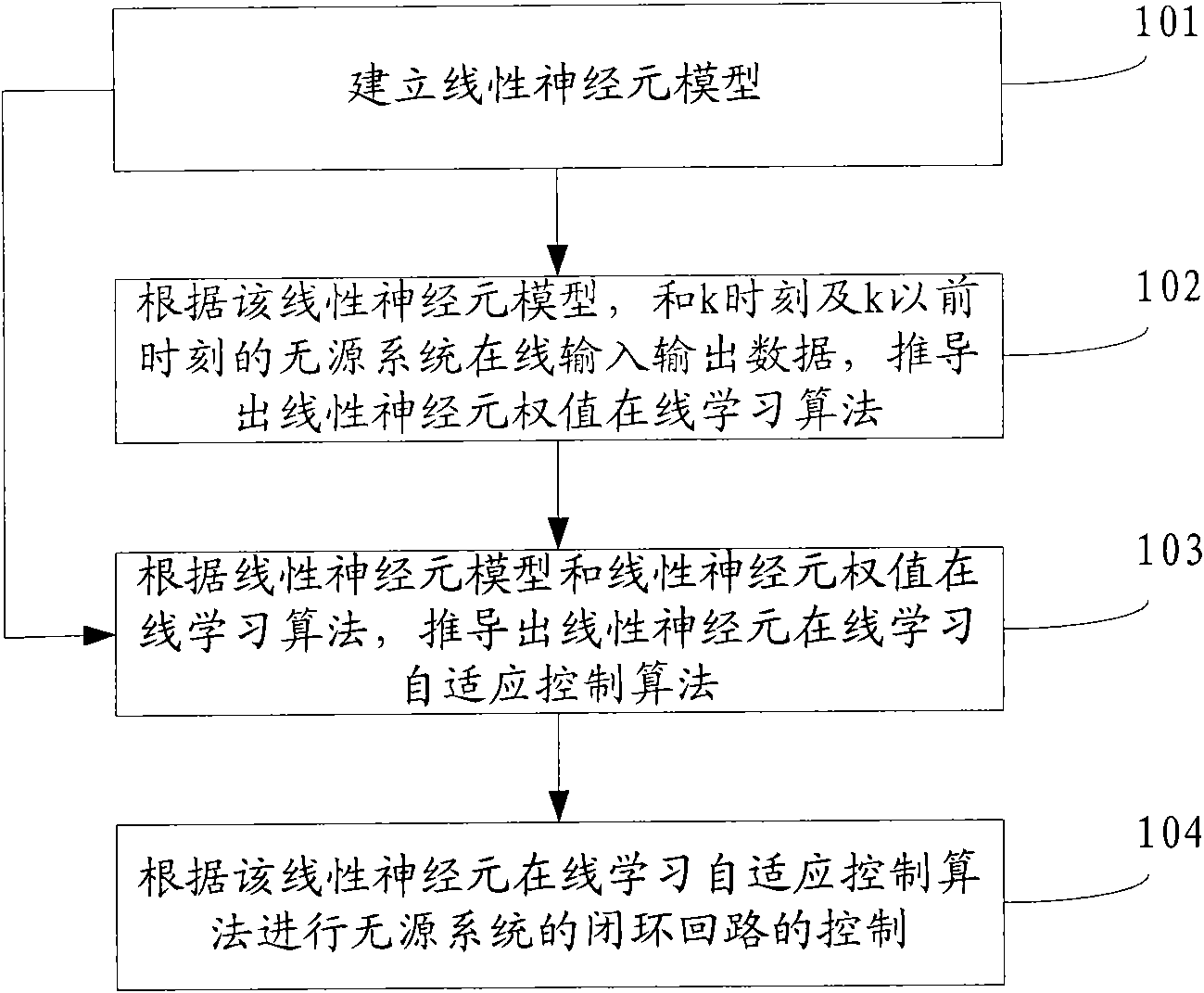
[0039] An embodiment of the present invention provides a passive system linear neuron online learning adaptive control method, see figure 1 , the method flow is as follows:
[0040]101: Establish a linear neuron model, the linear neuron model is:
[0041] Its vector is expressed as Δy(k+1)=Φ(k)·ΔU T (k)+θ;
[0042] 102: According to the linear neuron model, and the online input and output data of the passive system at time k and before k, derive the linear neuron weight online learning algorithm:
[0043] Φ ^ ( k ) = Φ ^ ( k - 1 ) + ΔU ( k - 1 ) μ + ΔU ( k - ...
Embodiment 2
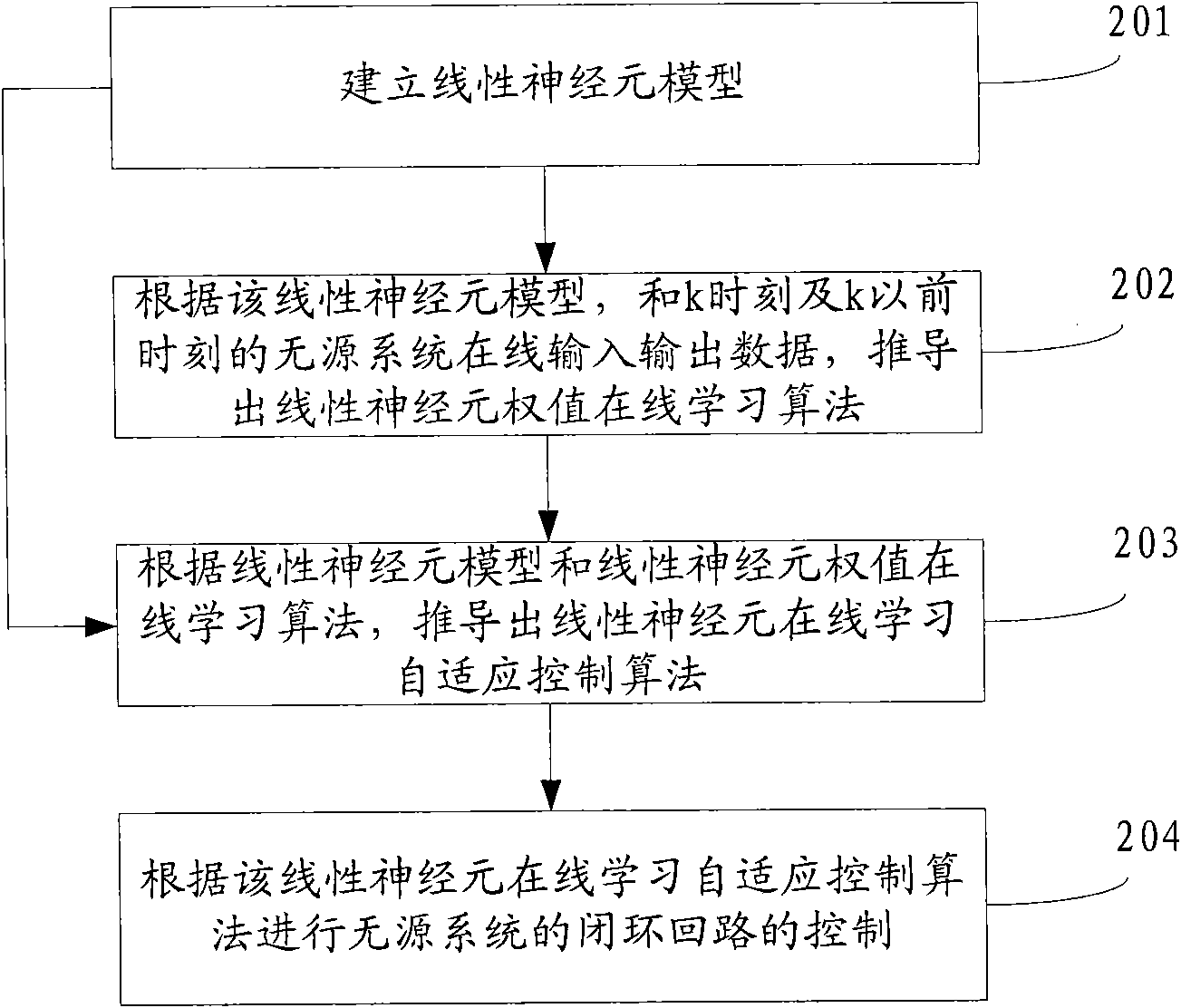
[0050] An embodiment of the present invention provides a passive system linear neuron online learning adaptive control method, see figure 2 , the method flow is as follows:
[0051] 201: Establish a linear neuron model, the linear neuron model is:
[0052] Its vector is expressed as Δy(k+1)=Φ(k)·ΔU T (k)+θ;
[0053] Wherein, the characteristic of the linear neuron model is that the excitation function of the neuron is taken as a simple linear function y=x.
[0054] Specifically, considering the SISO (Single Input Single Output, single input single output) discrete dynamic nonlinear system Y=F(·), both can be expressed as:
[0055] Δy ( k + 1 ) = Σ i = 0 n w i ( k ) Δu ( k - i...
Embodiment 3
[0150] see Figure 7 , the embodiment of the present invention provides a passive system linear neuron online learning adaptive control controller, the controller includes:
[0151] The linear neuron module 701 is used to establish a linear neuron model, and the linear neuron model is:
[0152] Its vector is expressed as Δy(k+1)=Φ(k)·ΔU T (k)+θ;
[0153] The weight online learning algorithm module 702 is used to derive the linear neuron weight online learning algorithm according to the linear neuron model and the online input and output data of the passive system at time k and before k:
[0154] Φ ^ ( k ) = Φ ^ ( k - 1 ) + ΔU ( k - 1 ) μ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com